El origen de los datos con los que trabajamos en un SIG
puede ser muy variado y presentarse en formas diversas. La
metodología seguida en la recolección de datos condiciona
directamente la forma en que estos datos llegan a nosotros,
y por tanto el uso que les podemos dar dentro de un SIG o
las operaciones que debemos realizar con ellos.
No hace tanto tiempo, toda la información que se manejaba
dentro de un SIG tenía su origen en un mapa en papel, el
cual debía
prepararse
para adaptarse a la naturaleza propia del SIG. El desarrollo
de los SIG ya había comenzado a dar sus frutos y exisstían
los programas, pero eran necesarios datos para utilizarlos.
Sin embargo, los datos geográficos de los que se disponía no
se encontraban en formato digital, por lo que no eran
adecuados para su uso dentro de un SIG.
Una tarea básica en esos tiempos era la digitalización de
cartografía, es decir, convertir los datos geográficos en
formato impreso en datos en formato digital que un SIG
pudiera manejar. La disponibilidad de datos digitales era
baja, pero, como resulta lógico pensar, sí que existía una
gran cantidad de datos geográficos en otros formatos tales
como mapas, cartas de navegación, fotografías aéreas, etc.
La tecnología ha ido avanzando y ya se producen datos
directamente en formato digital, considerando
específicamente la existencia de los SIG como herramientas
básicas de manejo de datos geográficos. No obstante, los
datos en formato impreso, así como las técnicas que se
emplearon en su creación, siguen siendo válidas, y sirven
igualmente para crear datos geográficos que podemos emplear
en un SIG.
Hoy en día, la situación es bien distinta a la de aquellos
primeros tiempos, y puede afirmarse que los orígenes a
partir de los cuales se generan los datos geográficos son
muy diversos. Esto es así porque aunan técnicas recientes y
más adaptadas al entorno de los SIG con métodos clásicos que
no han perdido su vigencia y valor.
A lo largo de este capítulo veremos las principales técnicas
existentes para la creación de datos geograficos en un
formato apto para su uso en un SIG, centrándonos en los
pormenores de proceso y las particularidades de los datos
generados en cada caso. Para ello, veremos todo el conjunto
de fuentes de las cuales pueden provenir los datos con los
que trabajamos en un SIG, desde las más modernas hasta las
más antiguas, así como las metodologías que permiten
convertir las formas no digitales en datos aptos para su uso
en dicho SIG. El objetivo es que, al final del capítulo, se
conozcan con detalle todas las formas en las que los datos
geográficos pueden presentarse, se entiendan estas
completamente con independencia de su origen, y se sepan
utilizar y combinar todas las fuentes de datos.
Datos digitales y datos analógicos
La principal diferencia que se presenta desde la aparición
de los SIG es la necesidad de utilizar datos digitales. Un
SIG implica una aplicación informática, y esta se alimenta
en última instancia exclusivamente de datos digitales. Esta
es la razón por la que debemos alimentar nuestro SIG con una
serie de valores numéricos, y llegar a ellos a partir de la
realidad que se pretende modelizar implica toda una serie de
etapas, las cuales ya vimos con detalle en el capítulo
Tipos_datos
Gran parte de los datos geográficos que se producen
actualmente son en formato digital. Otros, a pesar de
producirse hoy en día, no lo son directamente. Y junto a
estos tenemos, como ya sabemos, todos los datos (que no son
pocos) generados con anterioridad y que se presentan en
diversas formas. Pero si deseamos trabajar con ellos en un
SIG, de un modo u otro todos habrán de acabar siendo
digitales.
Los datos geográficos digitales tienen una serie de ventajas
frente a los analógicos (además del mero hecho de que
podemos incorporarlos a nuestro SIG), y suponen, como sucede
en muchos otros campos, un salto cualitativo importante.
Estas ventajas pueden resumirse en las siguientes:
Sencillez de actualización
. La cartografía digital es editable, y esto simplifica
enormemente la introducción de cambios. Si en una capa
con información catastral cambia la frontera de una
parcela, basta modificar esta frontera. En un mapa
analógico habría que rehacer todo el mapa y volver a
imprimirlo.
Además, y gracias a la división en capas, pueden
actualizarse a distintos ritmos las distintas
variables, pues son independientes y pueden
modificarse por separado.
Haciendo una analogía con el mundo editorial,
piénsese en un diario impreso, con una única edición
al día, en la que se ha de esperar al día siguiente
para introducir todas las noticias que se vayan
produciendo durante esa misma jornada. En su
equivalente digital, la información se actualiza
prácticamente en tiempo real, y podemos conocer las
noticias mucho antes, pues es más sencillo
actualizar esa página que volver a poner la imprenta
en marcha.
Es asimismo muy importante el hecho de que, gracias
a los sistemas que centralizan el acceso a los
datos, esta edición y actualización de datos pueden
hacerla varias personas de modo concurrente. Esto no
resulta posible en el caso de cartografía impresa,
donde frecuentemente se encuentra el problema de que
una cartografía de uso interno en una organización
(por ejemplo, un ayuntamiento que guarda un
inventario de su mobiliario urbano) ha sido editada
por varias personas (el operario que sustituye un
elemento de ese mobiliario luego lo registra en su
inventario, y en un instante distinto otro operario
puede añadir en su propio mapa la localización de un
nuevo elemento añadido), siendo necesario después
unir todas las modificaciones, lo cual no siempre
resulta sencillo o incluso posible.
Si varias personas trabajan con cartografía impresa
de una zona, cada una de ellas tendrá su propio
mapa. Con la cartografía digital, todos pueden
obtener la cartografía de un repositorio central, de
tal modo que si la editan, están editando una única
versión, y no es necesario después poner en común
todas sus aportaciones para crear una nueva
cartografía actualizada.
Facilidad de distribución
. Resulta más sencillo y menos costoso distribuir
cartografía digital que analógica, por ejemplo a través
de Internet. Volviendo al ejemplo del diario, las
noticias se actualizan y se ponen en la Web, de donde
cada lector las descarga de inmediato. El diario impreso
requiere una cadena de distribución más costosa, desde
la imprenta hasta el punto de venta.
Espacio de almacenamiento
. Se generan actualmente volúmenes ingentes de datos que
además, y gracias a que son más fáciles de actualizar,
se producen con una frecuencia mucho mayor. No obstante,
un soporte digital puede almacenar una enorme cantidad
de estos ocupando una fracción del espacio físico. En un
ordenador dotado de una buena capacidad de
almacenamiento caben los contenidos de una cartoteca y
los de la hemeroteca de ese diario del que hablamos. Las
mismas cartoteca y hemeroteca en formato impreso
requieren edificios enteros.
Facilidad y precisión de análisis
. Como ya veremos en la parte correspondiente, el salto
cualitativo que se da en el campo del análisis es
enorme. Podemos hacer con los datos geográficos
digitales cosas que no eran posibles con los analógicos
y, mejor aún, podemos automatizar estos análisis.
Asimismo, la precisión es mayor, ya que depende
únicamente de los datos y la precisión intrínseca de
estos, pero no de la operación de análisis (piénsese en
un mapa impreso y una serie de operarios midiendo la
longitud de un río sobre él. Es probable que lleguen a
resultados similares pero no idénticos. Con cartografía
digital, cualquier operario, y en cualquier SIG
—suponiendo que implementan todos las mismas fórmulas—
llegaría al mismo resultado exacto).
Facilidad de mantenimiento
. Aunque no se introduzcan modificaciones y no se
actualicen los datos, el formato digital hace más fácil
su conservación. La degradación del soporte no degrada
directamente el dato en sí, haciéndole perder calidad.
La degradación del soporte analógico (el papel), sí que
lo hace. Además, los datos digitales pueden replicarse
con suma facilidad, por lo que su persistencia está
garantizada en mayor medida y a un menor coste que la de
los datos analógicos.
Así pues, disponemos para nuestro trabajo en nuestro SIG de
datos analógicos y datos digitales, siendo estos últimos los
que necesitamos, y que presentan las ventajas anteriormente
descritas frente a los primeros. En las siguientes
secciones, veremos con detalle todos los distintos tipos de
datos geográficos, tanto digitales como analógicos, la forma
en que se obtienen, sus características, cómo se incorporan
a un SIG, y en general todo aquello que resulte de interés
para una mejor comprensión y uso de los mismos.
Fuentes primarias y fuentes secundarias
Como hemos visto, algunos datos que utilizamos en un SIG son
de tipo analógico, mientras que otros son de tipo digital.
En algunos casos (generalmente en los analógicos), estos
datos no han sido tomados pensando en su utilización en un
SIG, y nos van a servir de base para obtener otros que sí
pueden emplearse directamente dentro de un SIG. Por el
contrario, existen otros datos que ya han sido recogidos
considerando su utilización dentro de un Sistema de
Información Geográfica, y la forma en la que se presentan ya
es adecuada para incorporarlos en este y trabajar con ellos.
En base a lo anterior, se define una forma distinta de
clasificar los datos espaciales con los que trabajamos en un
SIG: datos primarios (o procedentes de una fuente primaria)
y datos secundarios (o procedentes de una fuente secundaria)
[
Jackson1991Longman
].
Los datos primarios son aquellos que podemos emplear en un
SIG y que, en su forma original, ya son susceptibles de ser
sometidos a las operaciones de manejo y análisis que
incorporan los SIG. En este grupo encontramos las imágenes
digitales o los datos obtenidos con GPS, todos ellos
recogidos ya en origen de forma adecuada para su empleo
directo en un SIG.
Por su parte, los datos secundarios derivan de algún otro
tipo de dato previo, el cual no es adecuado para su empleo
en un SIG. Entre estos incluimos las versiones digitales de
los mapas clásicos (veremos en breve cómo se lleva a cabo
esa conversión de un documento analógico a uno digital), así
como los datos procedentes de un muestreo o levantamiento
tradicional. Otros provenientes de cartografía impresa,
tales como capas de elevaciones, también se incluyen en este
grupo.
Al desarrollar las fuentes de datos en este capítulo, se
tratarán tanto fuentes primarias como secundarias, y en el
caso de estas últimas se tratarán a su vez las formas en las
que a partir de estas pueden derivarse datos digitales que
puedan ya ser incorporados a un SIG.
Teledetección
La primera fuente de datos que trataremos en este capítulo
es la teledetección. Entendemos por teledetección el estudio
y medida de las características de una serie de objetos (en
nuestro caso elementos de la superficie terrestre) sin que
exista contacto físico [
Curran1991Longman
][
Lillesand1997Wiley
][
Chuvieco1996Rialp
]. Para ello, se miden las perturbaciones que el objeto
provoca en su entorno, principalmente las de tipo
electromagnético.
Tradicionalmente, la teledetección se ha estudiado como una
materia complementaria pero en cierto modo separada de los
Sistemas de Información Geográfica. Ello es debido
principalmente a que se trata de una materia muy extensa
cuyo desarrollo se ha producido en cierta parte de forma
ajena al de los SIG. No obstante, a medida que ambos campos
se han ido desarrollando, la convergencia entre SIG y
teledetección se ha ido haciendo cada vez más evidente. No
solo las aplicaciones SIG incorporan elementos para el
manejo, tratamiento y análisis de datos procedentes de la
teledetección, sino que las formulaciones de ambos ámbitos
contienen elementos similares.
La teledetección es hoy en día un elemento clave para la
formación en SIG, y como tal debe incluirse en un libro como
este. Los bloques tradicionales en los que se divide el
temario fundamental de la teledetección no incorporan
únicamente el registro de la información y la creación de
los datos, sino también su proceso posterior, interpretación
y tratamiento. Este último no se detalla en este capítulo,
sino en la parte dedicada al análisis, integrado junto con
otras formulaciones similares para proceso de imágenes.
Aunque el aprovechamiento de los productos actuales de la
teledetección depende en gran medida del concurso de los SIG
y sus capacidades de análisis, los procesos de teledetección
aplicados al ámbito cartógráfico y el análisis espacial se
remontan a tiempo atrás, concretamente a la mitad del siglo
XIX. Fue entonces cuando se tomaron las primeras fotografías
aéreas, uniendo el recién desarrollado campo de la
fotografía con la utilización de globos aerostáticos como
medio para situar el aparato fotográfico a una altura
suficiente que permitiera obtener las imágenes.
Las fotografías aéreas fueron el primer producto de la
teledetección, pero hoy en día existen otros que, basados en
esa misma idea de registro de información, pueden ser
empleados como fuentes de datos espaciales dentro de un SIG.
Para comprenderlos, estudiemos algo más en detalle los
elementos del proceso de teledetección, los cuales se
representan de forma esquemática en la figura
\ref{Fig:Elementos_teledeteccion}.
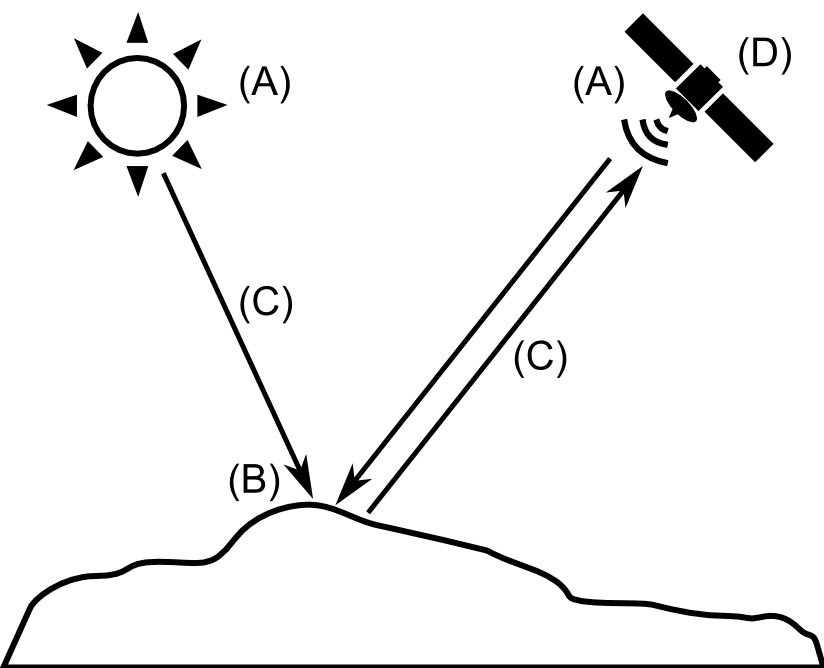
Esquema de un sistema de teledetección.
$$\label{Fig:Elementos_teledeteccion}$$
Estos elementos son los siguientes:
Una fuente de radiación (A)
. Puede ser de origen natural o artificial. La radiación
emitida por dicha fuente llega al terreno y sufre una
perturbación causada por los elementos de este, siendo
esta perturbación el objeto de estudio de la
teledetección. Los propios objetos pueden ser también
emisores ellos mismos de radiación.
Unos objetos (B) que interaccionan con la radiación
o la emiten, según lo anterior.
Una atmósfera (C)
por la que se desplaza la radiación, tanto desde la
fuente hasta el objeto como desde el objeto hasta el
receptor. La atmósfera también interactúa con la
radiación, introduciendo igualmente perturbaciones en
ella.
Un receptor (D) que recoge la radiación
una vez esta ha sido perturbada o emitida por los
objetos. El receptor va a generar como producto final
una imagen (en términos de un SIG, una capa ráster), en
cuyas celdas o píxeles se va a contener un valor que
indica la intensidad de la radiación. Estos valores son
valores enteros que indican el nivel de dicha radiación
dentro de una escala definida (habitualmente valores
entre 1 y 256), y se conocen dentro del ámbito de la
teledetección como
Niveles Digitales
.
Para estudiar los dos primeros, estudiaremos los fundamentos
físicos relativos a la radiación y a la la interacción entre
esta y la materia, mientras que para el estudio del sistema
receptor analizaremos dos de sus componentes por separado:
sensores y plataformas.
La interacción de la atmósfera interesa de cara a eliminar
su efecto, ya que lo que resulta de interés en general son
los objetos en la superficie terrestre, no la atmósfera como
tal. Eliminar esta influencia de la atmósfera es parte de
los procesos posteriores que se realizan con la imagen y que
incluyen también, como se mencionó anteriormente, la
interpretación y otros procedimientos diversos sobre esta.
Todos ellos se tratan, tal y como se dijo, en un capítulo
independiente dentro de la parte de procesos.
Fundamentos físicos
Es necesario conocer los conceptos fundamentales sobre la
radiación y su interacción con la materia (los objetos de la
superficie terrestre) para poder entender cómo, utilizando
la radiación de una fuente dada, se crea una imagen como
resultado final en un proceso de teledetección.
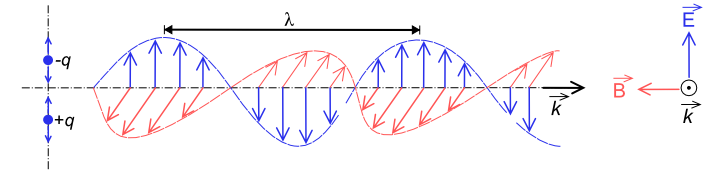
Ondas correspondientes a los campos magnético y
eléctrico, ortogonales entre sí (Tomado de
Wikipedia).
$$\label{Fig:Radiacion_electromagnetica}$$
La radiación electromagnética
La radiación electromagnética es una de las cuatro fuerzas
fundamentales de la naturaleza y deriva del campo
electromagnético, el cual es ejercido por las partículas
cargadas eléctricamente. Para explicar esta existen dos
modelos conocidos como
modelo ondulatorio
y
modelo de partículas
. Según el primero, que será en el que profundicemos, la
radiación electromagnética es producto de las alteraciones
en los campos eléctrico y magnético, que generan dos ondas
ortogonales entre sí, correspondientes a cada uno de los
campos anteriores (Figura
\ref{Fig:Radiacion_electromagnetica}).
Estas ondas se desplazan a la velocidad de la luz, y se
pueden describir con los parámetros habituales, tales como
la longitud de onda o la frecuencia. Una mayor longitud de
onda (y, por tanto una menor frecuencia) tiene asociada una
mayor energía de la radiación.
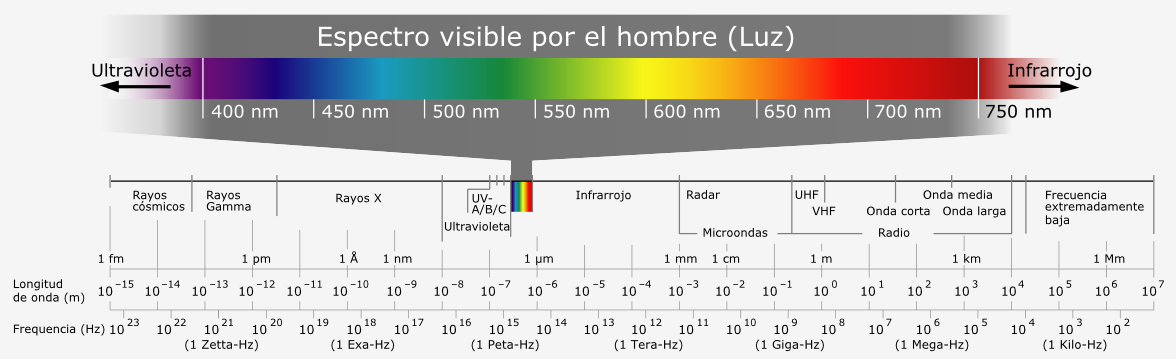
La radiación electromagnética puede cubrir de forma continua
todo un amplio rango de valores de longitudes de onda. Este
rango se conoce como
espectro electromagnético
. Pese a la continuidad de sus valores, es habitual
agruparlos en regiones, discretizando la amplitud del
espectro, ya que las radiaciones en longitudes de onda
cercanas presentan a su vez comportamientos similares en
muchos sentidos. En la figura
\ref{Fig:Espectro_electromagnetico} se muestra un esquema
del espectro electromágnético y sus principales regiones de
interés.
Espectro electromagnético y sus principales regiones
de interés (Tomado de Wikipedia).
$$\label{Fig:Espectro_electromagnetico}$$
Dentro de estas regiones, son de destacar las siguientes:
Rayos $\gamma$
Rayos X
(0.03 $nm$ - 3 $nm$).
Ultravioleta
(3 $nm$ - 0.3 $\mu$).
Visible
(0.3 $\mu$ - 0.7 $\mu$). Se corresponde con las
radiaciones que pueden ser detectadas por el ojo humano
o por aparatos tales como una cámara fotográfica común.
Observando la figura \ref{Fig:Espectro_electromagnetico}
puede apreciarse que esta región representa una porción
muy pequeña del total del espectro. Existen muchas otras
regiones que no podemos «ver» pero que, empleando la
tecnología adecuada, sí que pueden aprovecharse para
crear imágenes dentro de un proceso de teledetección,
siendo de gran utilidad para el estudio de numerosos
procesos.
Las distintas longitudes de onda dentro de esta
región son las responsables de los distintos colores
que percibimos. Así, por ejemplo, el azul se
corresponde con el rango entre 0.4 $\mu$ y 0.5
$\mu$, mientras que el verde lo hace con el rango
entre 0.5 $\mu$ y 0.6 $\mu$
Infrarrojo cercano
(0.7 $\mu$ - 1.3 $\mu$).
Infrarrojo medio
(1.3 $\mu$ - 8 $\mu$).
Infrarrojo lejano o térmico
(8 $\mu$ - 14 $\mu$). Dentro de esta región se
encuentran principalmente las radiaciones emitidas por
los cuerpos debido a su temperatura.
Microondas
(1 $mm$ - 25 $cm$).
En el capítulo
Procesado_imagenes
estudiaremos para qué tipo de análisis resulta útil cada una
de las regiones del espectro, cuando veamos como analizar
las imágenes procedentes de la teledetección.
Como ya se dijo en el capítulo
Tipos_datos
, las imágenes como capas ráster presentan habitualmente la
particularidad de tener varias bandas. En lugar de un único
valor para cada celda, existen $n$ valores, uno por cada
banda. Esto es así porque la imagen recoge la intensidad de
la radiación (recordemos que esto se denominaba Nivel
Digital) dentro de una amplitud dada del espectro, y a su
vez subdivide esta en distintas franjas. Los Niveles
Digitales de cada banda corresponden a la intensidad dentro
de una de esas franjas del espectro en particular.
Interacción entre radiación y materia
La radiación emitida por una fuente de radiación es alterada
por la presencia de los distintos objetos, que interactúan
con ella. Independientemente de su procedencia, para toda
radiación se dan tres fenómenos fundamentales al alcanzar un
objeto:
Absorción
. El objeto toma la energía de la radiación.
Transmisión
. La radiación atraviesa el objeto y continua su camino.
Reflexión
. La radiación «rebota» en el objeto y vuelve al
espacio.
Estos tres fenómenos se dan en diferente proporción en
función de las características del objeto y de la radiación.
Para una longitud de onda dada, existe, pues, un porcentaje
de la radiación que es absorbida por el objeto, otra que se
transmite a través de él y otra que es reflejada. La parte
que interesa a efectos de la teledetección es aquella que se
refleja en el objeto, ya que esta es la que posteriormente
puede recogerse y emplearse para la generación de las
imágenes.
La proporción en la que los tres procesos anteriores se dan
en un objeto no es la misma para todas las radiaciones. Un
objeto puede absorber una gran parte de la radiación dentro
de una región del espectro y sin embargo reflejar la mayoría
de ella en una región distinta. Es por ello que, en función
del análisis que se desee realizar, debe trabajarse con
imágenes que traten una u otra región.
Igualmente, una imagen con varias bandas contiene
información sobre la intensidad de la radiación reflejada en
distintas partes del espectro. Puesto que cada objeto
refleja de forma diferente la radiación en cada una de esas
partes, pueden igualmente emplearse para identificar objetos
particulares si se conoce la respuesta de estos en
determinadas bandas. Por ejemplo, si sabemos que los objetos
que buscamos reflejan gran cantidad de radiación en todas
las longitudes de onda excepto en un rango concreto. Aparece
así el concepto de
firma espectral
como la respuesta característica de un tipo de objeto dentro
del espectro electromagnético. Veremos mucho más al respecto
en el capítulo
Procesado_imagenes
, así como en el
Estadistica_avanzada
, donde estudiaremos una aplicación habitual de dichas
firmas espectrales.
Además de la interacción con los objetos que se pretenden
estudiar, la radiación interactúa con la atmósfera. Esta
interacción afecta al resultado y es una variable a
considerar en ciertas operaciones posteriores con las
imágenes. Veremos más sobre la interacción entre radiación y
atmósfera en el apartado
Correccion_imagenes
, cuando tratemos esas operaciones.
Sensores y plataformas
En un sistema de teledetección, dos son los elementos
tecnológicos principales que lo definen: el
sensor
y la
plataforma
.
El sensor es el elemento que incorpora la capacidad de
«leer» la radiación electromagnética y registrar su
intensidad dentro de la una zona concreta del espectro. En
palabras más sencillas, es el aparato que nos permite
«tomar» la imagen, y puede ir desde una simple cámara
fotográfica hasta un sensor más especializado capaz de tomar
cientos de bandas en una región del espectro de gran
amplitud.
La plataforma, por su parte, es el medio en el que se sitúa
el sensor y desde el cual se realiza la observación. Los dos
tipos principales de plataformas son aquellas situadas
dentro de la atmósfera terrestre (aviones en su mayoría,
aunque también en otros medios tales como globos
aerostáticos) y aquellas situadas fuera de la atmósfera (a
bordo de satélites).
Las características de estos dos elementos definen las del
sistema en su conjunto, así como las propiedades de sus
productos derivados y la utilidad que estos presentan.
Plataformas
La plataforma es el medio en el que se transporta el sensor,
y condiciona las mediciones efectuadas por este, ya que
establece la distancia a la que el sensor se sitúa del
elemento registrado (la superficie terrestre). Esta
distancia puede ser del orden de algunos centenares de
metros o unos pocos kilómetros, o bien de muchos kilómetros.
En el primer caso, la plataforma más habitual es el avión,
mientras que en el segundo caso lo más frecuente es el uso
de satélites.
Los aviones son las plataformas clásicas a bordo de las
cuales se montaban originariamente las cámaras empleadas
para la realización de fotografías aéreas. Hoy en día pueden
montarse igualmente otros sensores más complejos y modernos
a bordo de aeronaves.
Las ventajas del empleo de aviones como plataformas de
teledetección son las relacionadas con la disponibilidad de
la plataforma, que es mucho mayor que en el caso de emplear
satélites. Podemos (dentro de lo razonable) escoger cómo,
cuándo y dónde efectuar un vuelo y tomar imágenes, mientras
que en caso de satélites la disponibilidad viene
condicionada por numerosos factores y es muy reducida.
Respecto a los inconvenientes, pueden citarse entre ellos la
inestabilidad de la plataforma y la dependencia de las
condiciones del clima, que pueden afectar a la propia
estabilidad y a la calidad de los resultados, o incluso
impedir la realización del vuelo. Por ser plataformas de
baja altura, no pueden abarcar superficies tan amplias como
los satélites, requiriendo más tiempo para cubrir una zona
dada.
Por su parte, los satélites artificiales presentan unas
características distintas como plataformas de teledetección,
siendo muy útiles para la teledetección sobre la superficie
terrestre. Es habitual que a bordo de un mismo satélite
coexistan diversos sensores, de forma que una única
plataforma transporta varios de ellos.
A diferencia de un avión, un satélite no puede dirigirse a
voluntad (no puede pilotarse), y su movimiento es una
característica inherente que viene definida por una serie de
parámetros. Estos parámetros se conocen como
parámetros orbitales
, pues definen la órbita descrita por el satélite en torno a
la Tierra.
Las órbitas pueden clasificarse en función de su eje de
rotación en tres tipos:
Ecuatoriales
, si se sitúan en el mismo plano en el ecuador
terrestre.
Polares
, si se sitúan en un plano que contiene al eje de
rotación terrestre.
Semipolares
, si la órbita es oblicua al eje de rotación
Con un criterio distinto, atendiendo a la forma en que se
produce el movimiento, distinguimos dos tipos de órbitas
para un satélite:
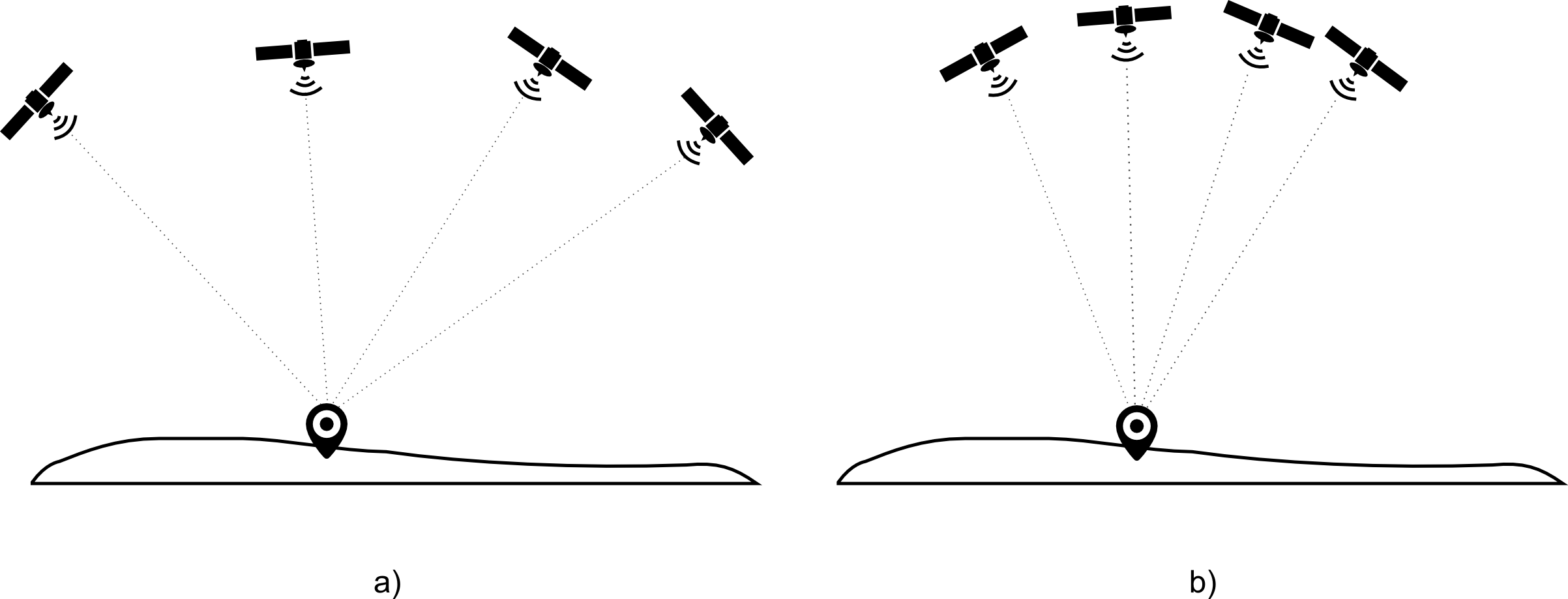
Geosíncronas
. El satélite se sitúa sobre un punto fijo de la Tierra
y su movimiento sigue al de rotación de esta. Es decir,
no existe movimiento relativo entre dicho punto de la
superficie terrestre y el satélite. Todas las imágenes
que se toman desde el satélite tendrán así el mismo
encuadre y cubrirán una extensión idéntica. La altura
del satélite es fija, siendo esta de 35.786 km, ya que
esta altura hace que la velocidad del satélite se
corresponda con la de rotación de la Tierra. La ventaja
de este tipo de satélites es que, por situarse siempre
sobre un punto y siempre teniendo visión sobre una zona
dada, se pueden actualizar con mucha frecuencia las
imágenes. El inconveniente principal radica en el hecho
de que las zonas alejadas del punto sobre el que se
sitúa el satélite tendrán mala cobertura, y existirán
zonas no cubiertas de las que no resultará posible
obtener imágenes con los sensores montados a bordo de
dicho satélite. Pese a que un sensor sobre un satélite
con órbita geosíncrona cubrirá una gran porción de la
superficie terrestre (debido a la elevada altura a la
que ha de situarse para tener dicha órbita), no resulta
posible, como es lógico, cubrir toda ella y hacerlo
además en las mismas condiciones en todas las zonas.
Heliosíncronas
. Las órbitas heliosíncronas son generalmente polares.
Mientras el satélite recorre la órbita, la Tierra
efectúa su movimiento de rotación, lo cual hace que a
cada vuelta de la órbita se cubran zonas distintas. De
esta forma, se consigue dividir la totalidad de la
superficie terrestre en bandas que se van recorriendo
sucesivamente hasta que el satélite vuelve a situarse en
el mismo punto inicial. Las órbitas están diseñadas de
tal manera que ese regreso al punto inicial se produce a
la misma hora solar exacta que en el anterior ciclo, de
forma que las imágenes tomadas en un punto dado son
registradas siempre a la misma hora y en condiciones
similares de iluminación. Para que sea posible realizar
una órbita de este tipo, el satélite debe situarse entre
300 y 1500 km de altura. La figura
\ref{Fig:Orbita_landsat} muestra un ejemplo de la forma
en que un satélite con una órbita heliosíncrona barre
toda la superficie de la Tierra.
Esquema de barrido de un satélite con órbita
heliosíncrona
$$\label{Fig:Orbita_landsat}$$
Debido al movimiento que causa las distintas franjas,
los satélites con este tipo de órbitas pueden cubrir
toda la superficie terrestre, algo que no es posible con
los de órbita geosíncrona. No obstante, una vez que se
toma una imagen de una zona, la plataforma no regresa a
ella hasta que se concluye todo el ciclo, habiendo
transcurrido un periodo de tiempo que se conoce como
periodo o intervalo de revisita
. Debido a ello, la actualización de las imágenes no
puede ser tan inmediata como en el caso de satélites
geosíncronos.
Sensores
Montado a bordo de cualquiera de los tipos de plataformas
que hemos visto en el apartado anterior, el sensor es el
encargado de registrar la radiación electromágnética
procedente de la zona estudiada y «tomar» la imagen.
Existen diversas formas de clasificar los sensores. Una
división básica es la que distingue sensores
activos
y sensores
pasivos
. Como ya sabemos, la radiación que recoge el sensor es el
resultado de una fuente de radiación electromagnética, cuyas
emisiones interactúan con el medio, que refleja una parte de
las radiaciones que le llegan. Los sensores pasivos
aprovechan las fuentes de radiación existentes en la
naturaleza (fundamentalmente el Sol) y se limitan a recoger
la radiación de dichas fuentes reflejada por los elementos
del medio, o la que estos elementos emiten por sí mismos. El
sensor no produce ningún tipo de radiación de por sí. Por el
contrario, los sensores activos sí emiten radiación, y
recogen dicha radiación tras ser reflejada por los elementos
del medio.
La diferencia fundamental entre estos dos tipos de sensores
es que los activos pueden funcionar en cualquier instante y
no dependen de la condiciones atmosféricas o el momento del
día. De la misma forma que no podemos tomar una fotografía
de noche sin luz, y no podemos ver el suelo desde un avión
cuando hay nubes, no podemos utilizar un sensor pasivo en
esas condiciones para tomar una imagen. Sin embargo, sí
podemos hacer una fotografía de noche si disponemos de un
flash, ya que la propia cámara emite la luz que necesita. La
filosofía de un sensor activo es en cierta medida similar al
caso de la cámara con flash.
Los sensores activos emiten su propia radiación, por lo que
no es necesario que existan fuentes externas (no es
necesaria la luz solar). Asimismo, los elementos
atmosféricos tales como las nubes, que afectan a la
radiación visible, no afectan a otros tipos de radiación,
permitiéndoles una operatividad total en la gran mayoría de
condiciones. Por ello, los sensores activos suelen trabajar
en el rango de microondas (frente a los sensores pasivos,
que lo hacen principalmente en las regiones del visible y el
infrarrojo), ya que estas son capaces de atravesar la
atmósfera en prácticamente todas las condiciones,
presentando así ventajas frente a los sensores pasivos en
este aspecto.
Aunque el producto habitual de la teledetección son las
imágenes, entendidas estas como algo
visual
, algunos sensores no forman tales imágenes, y los valores
que recogen no son las intensidades de la radiación
reflejada por el terreno en una longitud de onda dada. Es
decir, no se corresponderían con el concepto de Nivel
Digital ya presentado. Este tipo de resultados son
habituales en los sensores de tipo activo, en los que la
radiación que el propio sensor emite es recogida tras
reflejarse en el terreno, pero la variable que se mide de
ella no es su intensidad sino, por ejemplo, el tiempo que
tarda en regresar. Planteamientos como estos permiten la
generación de capas de datos que no son imágenes como tales,
como es el caso de las capas de elevación (Modelos Digitales
de Elevaciones), ya que el tiempo de retorno está
directamente relacionado con la distancia recorrida por la
radiación, y este con el relieve del terreno.
Estos sensores, no obstante, operan de un modo similar a lo
que ya conocemos, y se consideran igualmente dentro del
ámbito de la teledetección, pues se adscriben a la
definición de esta dada al principio de este apartado.
Veremos igualmente ejemplos de algunos de ellos cuando
veamos más adelante algunos sensores de particular
relevancia, ya que tienen una gran importancia en la
actualidad para la generación de cartografía, como por
ejemplo la ya citada de elevaciones.
El radar es la tecnología más importante dentro de este
grupo. El sensor envía pulsos de radio, y posteriormente
recoge estos midiendo su intensidad y pudiendo calcular
también la distancia al objeto.
Una técnica más moderna pero similar al radar es el
denominado LiDAR , que emplea pulsos de láser. El LiDAR es
en la actualidad la tecnología más avanzada para la creación
de cartografía de elevaciones, y dentro de este campo ha
supuesto una verdadera revolución, ya que obtiene
resoluciones muy elevadas, tanto horizontales como
verticales (resolución en los valores de elevación
calculados).
Los sistemas modernos de LiDAR son capaces de proporcionar
además varios retornos, de modo que, si el sensor sobrevuela
una zona arbolada, se tiene información sobre la distancia a
la copa y la distancia al suelo, ya que parte del láser
atraviesa la copa y alcanza el terreno. Este tipo de
resultados supone un salto cualitativo con respecto a los
obtenidos con otras tecnologías. Esto permite no solo
estudiar el terreno, sino derivar otros parámetros tales
como la altura de la vegetación [
Andersen2001PrecForestry
]. Asimismo, debido a su precisión, permite recoger
elementos del terreno que con otros sistemas no resulta
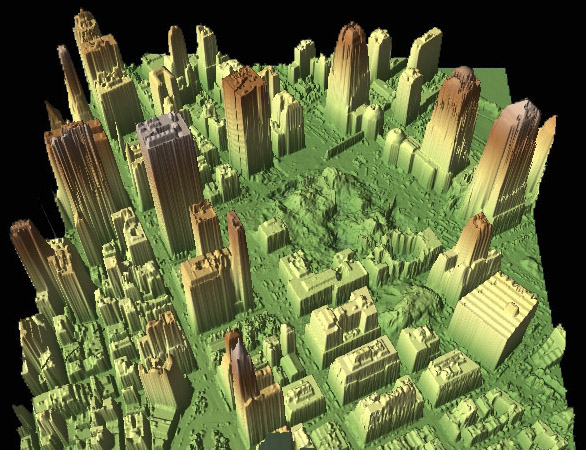
posible registrar, tales como edificios. A modo de ejemplo,
la figura \ref{Fig:LiDARWTC} muestra un modelo del World
Trade Center el 27 de septiembre de 2001, creado a partir de
datos LiDAR.
Modelo del World Trade Center realizado a partir de
datos LiDAR tomados el día 27 de septiembre de 2001
(Fuente: NOAA/U.S. Army JPSD)
$$\label{Fig:LiDARWTC}$$
En la terminología del LiDAR, la imagen correspondiente al
primer retorno (el de los puntos más altos) se conoce como
Modelo Digital de Superficie (MDS), mientras que el
correspondiente a la altura del suelo se conoce como Modelo
Digital de Elevaciones (MDE). Veremos mucho acerca de los
MDE en posteriores capítulos de este libro.
En [
Kraus2001IASPRS
] puede encontrarse una buena descripción del proceso de
creación de capas de elevación a partir de datos LiDAR.
Además de la división entre activos y pasivos, otra forma de
clasificar los sensores es en función de la forma en la que
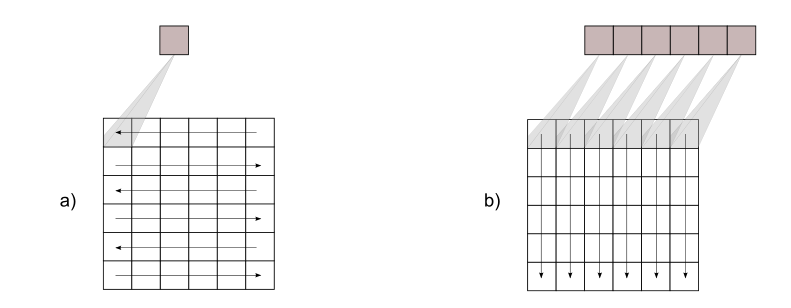
registran la imagen.
Algunos sensores poseen un único detector de radiación que
no cubre todo el ancho de la franja del terreno que se
pretende recoger. Por medio de espejos oscilantes, se envía
a este detector la radiación procedente de los distintos
puntos a lo ancho de esa franja, de forma que se van
recogiendo los píxeles de la imagen uno a uno, recorriendo
esta de un lado a otro (Figura \ref{Fig:Tipos_sensores}a).
Estos sensores se denominan
de barrido
.
Los denominados sensores
de empuje
(Figura \ref{Fig:Tipos_sensores}b) eliminan la necesidad de
utilizar espejos móviles, ya que poseen un número mayor de
detectores que permiten cubrir todo el ancho de la imagen.
Por ello, esta se va registrando no píxel a píxel, sino
línea a línea.
Esquema de funcionamiento de un sensor de barrido
(a) y uno de empuje (b)
$$\label{Fig:Tipos_sensores}$$
Resoluciones
Uno de los parámetros principales que definen las
propiedades de un sistema de teledetección son las
resoluciones
. Estas establecen el nivel de detalle de los productos que
el sistema genera, determinando este en las distintas
magnitudes en las que el sistema opera. Las resoluciones
dependen del sensor y de la plataforma como binomio
operativo, y de las características propias de ambos.
Distinguimos cuatro resoluciones, a saber:
Resolución espacial
. Indica la dimensión del objeto más pequeño que puede
distinguirse en la imagen. En líneas generales es el
equivalente al tamaño de píxel), modificar el tamaño de
píxel. Aunque este tamaño sea menor al original, los
objetos de menor dimensión que podrán discernirse en esa
imagen no serán iguales a ese tamaño, sino mayores.} es
decir, a la dimensión real que un píxel de la imagen
tiene sobre el terreno. La resolución espacial está en
función de la capacidad resolutiva del sensor y las
características de la plataforma tales como la altura a
la que se sitúa. Asimismo, la resolución espacial esta
relacionada con la superficie que cada imagen cubre
sobre el terreno. El concepto de
Campo Instantáneo de Visión
indica el ángulo de visión que abarca el sensor, y se
utiliza habitualmente en este sentido. El
Campo Instantáneo de Visión en Tierra
expresa esta misma idea pero en unidades de longitud
sobre el terreno, y es función del IFOV y la altura a la
que se encuentre el sensor. En el diseño de la órbita de
un satélite debe tenerse en cuenta el campo de visión
del sensor para optimizar el ciclo de toma de imágenes,
así como para evitar que las distintas franjas que este
cubre queden sin solaparse y existan zonas de las que no
se tomen imágenes.
Resolución espectral
. Todo sensor cubre una región particular del espectro y
almacena esta mediante un número dado de bandas. La
región del espectro abarcada y el número de bandas son
los elementos que definen la resolución espectral. Esta
será elevada si el número de bandas es alto, ya que cada
banda cubrirá un rango de frecuencias de menor amplitud.
De este modo, la información de dos frecuencias cercanas
puede separarse, ya que estas serán recogidas en bandas
distintas, mientras que si el número de bandas es menor
pertenecerán a la misma banda y no podrá hacerse
distinción alguna (la resolución será menor). En función
del número de bandas, pueden clasificarse las imágenes y
los sensores que las generan. Una imagen en blanco y
negro contiene una única banda. Las imágenes en color
contienen tres bandas, correspondientes a las
frecuencias del rojo, el verde y el azul. Existen
igualmente sensores con algunas bandas adicionales como
la del infrarrojo, que en total generan un número de
bandas no superior a diez. Todas estas imágenes se
conocen como
multiespectrales
. Las imágenes
superespectrales
tienen una mayor resolución espectral (bandas más
estrechas), y cubren una zona del espectro más amplia,
no limitándose al rango visible o el situado
inmediatamente junto a este. Por ello, su número de
bandas es mayor, generando imágenes con varias decenas
de ellas. Por último, las imágenes
hiperespectrales
presentan más de cien bandas, lo cual permite una
caracterización espectral sumamente precisa.
Resolución radiométrica
. Para cada una de las bandas que produce un sensor
(asociada esta a una determinada región del espectro
según su resolución espectral), el dato recogido, que
constituye su Nivel Digital, indica la intensidad
correspondiente a esa región. El nivel de detalle con el
que puede medirse esa intensidad es el que define la
resolución radiométrica del sensor. El número de Niveles
Digitales distintos que pueden recogerse es la medida de
la resolución espacial, y habitualmente es una potencia
de dos (de la forma $2^n$). Tanto las imágenes en blanco
y negro como las imágenes en color trabajan con 256
($2^8$) niveles, ya que este es el valor más cercano al
número de diferentes intensidades que el ojo humano
puede diferenciar. No obstante, los sensores de
teledetección pueden tener una mayor resolución
radiométrica (hasta 1024 o 2048 niveles), que si bien no
se aprecia en la representación visual, sí que supone
una diferencia en el tratamiento analítico de esos
Niveles Digitales.
Resolución temporal
. Indica el tiempo que tarda el sensor en volver a tomar
una imagen de una misma zona. Tiene sentido en el caso
de sensores orbitales, que funcionan por ciclos, y que
tras concluir este vuelven a comenzar la toma de
imágenes en el mismo punto. En cada ciclo, el sensor
cubre toda la superficie terrestre «barriendo» esta en
franjas sucesivas. La resolución temporal depende de la
altura a la que se encuentra la plataforma que monta el
sensor, así como de la resolución espacial. Si el tamaño
de las imágenes es reducido (GIFOV pequeño), las franjas
son más estrechas y se requieren más para cubrir toda la
superficie y volver a comenzar el ciclo, con lo que la
resolución temporal será menor.
Parece lógico pensar que lo ideal en toda circunstancia
sería disponer de imágenes procedentes de sistemas con altas
resoluciones en cualquiera de las clases anteriores. De esta
forma, tendríamos imágenes con gran detalle espacial,
espectral y radiométrico, y actualizadas frecuentemente. No
obstante, la tecnología actual no dispone de elementos que
ofrezcan resoluciones elevadas en todas las magnitudes del
proceso, y en la creación de los sensores se favorecen unas
en detrimento de otras. Algunas resoluciones presentan
además un cierto antagonismo, como hemos visto para las
resoluciones espacial y temporal, con lo que no resulta
viable que ambas sean elevadas simultáneamente.
Así, existen sensores con, por ejemplo, gran resolución
espacial, en los cuales la resolución espectral no es tan
elevada. Por el contrario, los sensores con mayor resolución
espectral no suelen ofrecer un nivel de detalle espacial tan
elevado como los anteriores. En ocasiones, una misma
plataforma puede montar a bordo varios sensores, de tal
forma que el conjunto de ellos ofrezca información detallada
de forma global, pero un único sensor no proporciona
resolución elevada en todas las variables.
Otro tipo de circunstancias relativas al sensor afectan
igualmente a las resoluciones. Por ejemplo, aquellos
sensores que trabajan con radiaciones de poca energía (en la
región de las microondas) y son de tipo pasivo requieren una
amplia extensión para recoger la suficiente energía como
para poder ser detectada por dicho sensor. Por esta razón,
su resolución espacial suele ser baja.
A la hora de utilizar imágenes de teledetección, debe
considerarse qué tipo de resolución resulta de mayor interés
para el proyecto que se lleva a cabo, teniendo en cuenta la
escala de trabajo o el objetivo final que se persigue, entre
otros factores. En base a esto, se escogerá uno u otro
producto, que será el que ofrezca los valores de resolución
más adecuados en conjunto.
Si se pretende localizar elementos de pequeño tamaño, es
imprescindible trabajar con altas resoluciones espaciales.
Si lo que se desea es clasificar una serie de zonas en
función de sus características, la resolución espectral debe
ser alta, ya que, como veremos, se usa la información de
todas las bandas para dar esa clasificación, y un número
mayor de bandas dará como resultado una mayor precisión.
De igual modo, la detección de cambios de intensidad en una
banda hace necesario que se trabaje con una buena resolución
radiométrica, pero si lo que se desea es estudiar esos
cambios a lo largo de un periodo corto de tiempo, trabajar
con un sensor con gran resolución temporal se hace
imprescindible.
En cada caso, las circunstancias particulares del trabajo
condicionan la elección de uno u otro sensor, puesto que,
como se ha dicho, un único sensor no ofrece elevadas
resoluciones en todas las variables.
La utilización simultánea de datos de varios sensores en un
proyecto es una alternativa en ciertos casos. Como veremos,
existen técnicas que permiten combinar imágenes con alta
resolución espacial e imágenes con alta resolución
espectral, con objeto de obtener nuevas imágenes que
combinen lo mejor de ambas y ofrezcan un nivel de detalle
conjunto mayor. Estas técnicas realizan el proceso conocido
como
fusión de imágenes
, el cual trataremos en el apartado
Fusion_imagenes
, más adelante en este libro.
Además de lo anterior, un único sensor montado a bordo de un
satélite puede operar en varios
modos
distintos. Es habitual que un sensor multibanda pueda
registrar también imágenes de una sola banda, recogiendo en
ella la intensidad de la radiación correspondiente a todo el
espectro visible, de tal forma que genere una representación
visual real. Estas se suelen representar habitualmente en
escala de grises, resultando una imagen en blanco y negro.
Las imágenes de este tipo se conocen como
pancromáticas
, y suelen tener mayor resolución espacial, por lo que
pueden emplearse para la fusión de imágenes señalada
anteriormente. Así, un mismo sensor provee todos los datos
necesarios para llevar a cabo ese proceso, tanto la imagen
de gran resolución espacial (la pancromática) como la de
gran resolución espectral (la imagen multibanda).
Principales sensores y productos
El número de diferentes productos provenientes de la
teledetección es muy elevado en la actualidad. Ahora que ya
conocemos los fundamentos del proceso y las principales
características de un sistema de teledetección, es
interesante mostrar un pequeño resumen de los principales
productos disponibles.
A continuación se relacionan algunos de los sistemas de
teledetección principales y las características de sus
productos.
LANDSAT
. Se trata de un programa completo de adquisición de
datos mediante teledetección, que ha lanzado hasta la
fecha un total de siete satélites entre 1972 y 1999. Por
ello, el volumen de datos recogido es enorme, y lo
convierte en una de las fuentes de datos más ricas de
entre las existentes en la actualidad.
El último satélite, LANDSAT 7, tiene una órbita
heliosíncrona y una resolución temporal de 16 días.
A bordo de él se monta el sensor ETM+, que permite
la obtención de imágenes pancromáticas con
resolución de 15 metros, e imagenes multibanda con
resolución de 60 metros. El sensor recoge un total
de 8 bandas, y el tamaño de la imagen es de 170
$\times$ 183 km.
Los sensores TM y MSS se montan a bordo del satélite
LANDSAT 5, todavía en funcionamiento y con una
resolución temporal de 16 días. El sensor TM ofrece
imágenes multibanda de 7 bandas con resolución de 30
metros, excepto en la banda del infrarrojo térmico,
donde la resolución es de 120 metros. Las imágenes
tienen un tamaño de 185 $\times$ 172 km.
IKONOS
. Este satélite, lanzado en 1999, monta un sensor con
resolución de 1 metro para imágenes pancromáticas y 4
metros para imágenes multibanda (4 bandas). Las imágenes
cubren una área de 11 $\times$ 11 km y el satélite tiene
una resolución temporal de entre 3 y 5 días.
SPOT
. Un conjunto de satélites lanzados inicialmente por la
agencia espacial francesa, con especial énfasis en la
recogida de información relativa a variables
ambientales. De los cinco puestos en órbita, dos siguen
actualmente en funcionamiento. El último de ellos,
lanzado en 2002, monta el sensor HRG con capacidad de
producir imágenes pancromáticas con resolución entre 2,5
y 5 metros, e imágenes multibanda con resolución de 10
metros. El periodo de revisita es de entre 1 y 4 días.
Es de destacar que el sensor permite inclinaciones de
hasta 27° respecto al nadir hacia ambos lados, por lo
que puede cubrir una banda más ancha y tomar imágenes
fuera del área determinada en cada instante por la
órbita.
QuickBird
. Ofrece imágenes en pancromático y multibanda (azul,
verde, rojo e infrarrojo cercano). Las primeras tiene
una resolución de 60 cm y las multibanda de 2,4 metros,
aunque combinando las dos ofrece imágenes en color con
60 cm de resolución. La órbita del satélite es
heliosíncrona y la resolución temporal varía entre los 3
y 7 días. Cada imagen cubre una superficie de 16,5
$\times$ 16,5 km.
Aqua y Terra
. Dos satélites lanzados por la NASA dentro de un
proyecto de ámbito internacional para la observación de
la Tierra. Cada uno de ellos monta una serie de diversos
sensores, que recogen información relativa al ciclo
hidrológico (en el caso del Aqua) y la superficie
terrestre (en el caso del Terra). Entre estos sensores
cabe destacar el MODIS, a bordo de ambos, o el ASTER, a
bordo del satélite Terra. ASTER recoge información en 14
bandas distintas, con una resolución entre 15 y 90
metros, mientras que MODIS es un satélite de menor
resolución espacial (250, 500 o 1000 metros según la
banda ), 36 bandas y una resolucion temporal de 1 a 2
días.
Además de los datos directos de los sensores, se
proporcionan de forma gratuita numerosos productos
derivados, lo que lo convierte en una fuente de
datos de primer orden para un gran número de
aplicaciones, especialmente las relacionadas con el
estudio del medio, la vegetación, etc.
NOAA--AVHRR
. Se encuentra principalmente enfocado al estudio de los
océanos, aunque sus datos pueden aplicarse en muchos más
estudios. El sensor tiene una resolución de 1,1 km, y
proporciona imágenes de 5 bandas en las regiones del
infrarrojo y el visible. La resolución temporal es de
medio día, produciendo una imagen nocturna y otra
diurna.
RADARSAT
. Desarrollado por la Agencia Espacial Canadiense, monta
un radar de apertura sintética (SAR), y su principal
propósito es el control de las variaciones ambientales y
de los recursos naturales.
ERS--1 y ERS--2
. Desarrollados por la Agencia Espacial Europea. Al
igual que el anterior, ambos están pensados para la
observación medioambiental, y montan tanto sensores
activos como pasivos.
SRTM
. La misión SRTM es un proyecto internacional de gran
envergadura destinado a la creación de una cobertura de
elevaciones a nivel mundial. Recogiendo el relieve de
todas las zonas situadas entre los 56 grados sur y los
60 grados norte de latitud. La resolución es de un
segundo de arco (aproximadamente 30 metros) para Estados
Unidos, y de unos 90 metros en el resto de zonas.
PlanetScope y SkySat
. Dos constelaciones de satélites desarrolladas y
gestionadas por la empresa Planet Labs. PlanetScope está
compuesta por más de 150 de los denominados
Doves
. Estos pequeños satélites —cuyo tamaño es similar al de
una caja de zapatos—, con una resolución espacial media
de 3.7 metros y productos multibanda (RGB y NIR), se
dedican al continuo monitoreo de nuestro planeta.
SkySat, por su parte, es una constelación de 16
satélites de alta resolución espacial cercana a los 50
cm, y un rápido periodo de revisita (menor de 24 horas).
Los objetivos a fotografiar de los satélites SkySat son
definidos por los propios clientes a través de un
sistema de interfaz y API.
Cartografía impresa. Digitalización
La primera fuente de cartografía de la que se disponía en
las etapas iniciales de los SIG era la cartografía impresa.
No se trataba de elementos creados pensando en su
utilización dentro de un SIG y su estructura no es la más
adecuada para su uso como datos de trabajo en un SIG. Se
trata, por tanto, de una clara fuente secundaria de datos
espaciales. Aun así, su uso ha sido desde esos tiempos una
constante dentro del ámbito SIG.
A pesar de que hoy en día disponemos de otras fuentes
cartográficas, la cartografía impresa sigue siendo básica
para trabajar con un SIG, ya que existe mucha información
que solo se encuentra en este formato. De una u otra forma,
es probable que un proyecto SIG implique en algún punto de
su desarrollo la necesidad de recurrir a cartografía impresa
y tratar esta para su inclusión dentro de un SIG.
Cuando hablamos de cartografía impresa, no hay que pensar
únicamente en mapas o planos, sino también en imágenes tales
como fotografías aéreas, las cuales, dependiendo de su
antigüedad, pueden encontrarse disponibles tan solo en
papel. Mientras que resulta posible adquirir estas en
formato digital cuando se trata de fotografías más actuales,
la tomadas por métodos analógicos correspondientes a vuelos
más antiguos solo pueden adquirirse por regla general como
un producto impreso.
Los procesos que permiten obtener un producto digital a
partir de esas imágenes son costosos en tiempo y dinero, y
es por ello que no todos los proveedores de estas ofrecen la
posibilidad de adquisición de un producto digital. En esta
sección veremos esos procesos, tanto si partimos de un mapa
o plano como si partimos de una imagen o cualquier otro
documento impreso que pueda contener información
cartográfica, susceptible de ser convertida en una o varias
capas.
Tanto mapas como fotografías aéreas pueden servir como
fuente de información para crear o bien capas ráster o bien
capas vectoriales, ya que la información que contienen puede
de igual modo representarse según uno u otro modelo.
Un mapa o plano sobre un soporte impreso, sin embargo, dista
considerablemente de ese concepto de capa con el que
trabajamos en un SIG. Suele contener información sobre
distintas variables, tales como carreteras, elevación,
núcleos urbanos, uso de suelo, y todas ellas en un único
elemento cartográfico. Esas variables, que en un SIG
manejaríamos como capas independientes, se presentan como un
conjunto que será conveniente disgregar en base a esas
distintas variables.
La creación de un dato digital a partir de un dato analógico
como un mapa impreso se conocen como
digitalización
, y esta puede ser automatica o manual.
En la digitalización automática, el sistema (informático o
mecánico) se encarga de generar los elementos digitales que
ya podremos incorporar a un SIG, ahorrando trabajo al
operador al automatizar la tarea. Este tipo de
digitalización es muy habitual para el caso de obtener un
resultado ráster mediante el proceso de
escaneo
. También resulta posible automatizar la digitalización para
el caso vectorial, aunque requiere cierta labor por parte
del operario y no es un proceso tan sencillo, pudiendo
obtenerse resultados desiguales.
La digitalización manual requiere por parte del operario una
definición explícita de los elementos a crear, y es por ello
únicamente adecuada para obtener un resultado vectorial,
trazándose las entidades (sean estas puntos, líneas o
polígonos) manualmente mediante algún sistema que permita
esa introducción de datos.
La elección de uno u otro tipo de digitalización no depende
solo del tipo de capa que se desee obtener. Tanto la
digitalización manual como la automática, tienen cada una de
ellas su propias ventajas. En el caso ráster la opción
manual no es viable, pero al digitalizar un mapa para
obtener una capa vectorial puede ser interesante optar por
una o otra metodología en función de las circunstancias.
La digitalización manual es mucho más costosa y su resultado
es muy variable en cuanto a su precisión espacial, ya que
depende en gran medida de la experiencia del operario y de
las condiciones de este (cansancio, circunstancias
personales, etc.). Por el contrario, e independientemente
del operario, el reconocimiento de las entidades es
altamente fiable (si se trata de un mapa, este ha sido
diseñado para ser interpretado por una persona, por lo que
esta reconocerá sus elementos sin dificultad y con total
fiabilidad).
Asimismo, un proceso automático, en caso de proceder de
forma correcta, tendrá una exactitud absoluta y «clonará»
con absoluta fidelidad los elementos del mapa impreso. Esto
resulta una ventaja a la hora de obtener una gran precisión,
pero impide que en el proceso de digitalización se puedan
corregir errores existentes en el documento original. Un
operario puede advertir esos errores y corregirlos a medida
que digitaliza. Un sistema automático, por el contrario, no
puede.
Digitalización manual
La digitalización manual es la forma más básica de crear
información digital a partir de un documento cartográfico
impreso. Un operario trabaja directamente sobre la fuente
cartográfica y su trabajo se traduce en la creación de una
nueva capa, gracias a la utilización de un equipo que es
capaz de convertir su trabajo en la información necesaria
para crear dicha capa.
En el modelo de representación ráster, los elementos básicos
son las celdas, que forman una malla regular que puede
presentar un numero muy elevado de estas. Una definición
manual de las características de cada una de esas celdas
resulta inviable, por lo que la digitalización de un
documento cartográfico impreso para la obtención de una capa
ráster a partir de ella de forma manual no es factible.
Por el contrario, se puede realizar con cierta sencillez la
digitalización de una entidad vectorial, trazando la forma
de esta o, en caso de ser una entidad de tipo punto,
sencillamente indicando su localización. Cuando el número de
entidades es elevado, el proceso puede llevar tiempo y ser
tedioso, pero en todo caso sigue resultando una forma
sencilla y accesible de crear una capa vectorial a partir de
otra fuente de datos.
Para llevar a cabo ese trazado de la entidad, se necesita
emplear algún equipo que recoja la información introducida
por el operador. Existen dos alternativas principales:
utilizar un equipo especializado diseñado específicamente
para la digitalización, o bien digitalizar utilizando las
funciones de edición de un SIG, realizando todo el proceso
dentro de este y sin más herramientas que el propio
ordenador y un dispositivo señalador como el ratón.
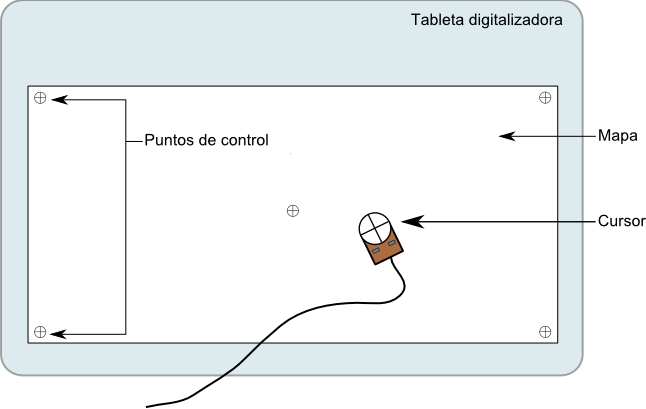
Esquema de una tableta digitalizadora y los elementos
del proceso de digitalización.
$$\label{Fig:Tableta_digitalizadora}$$
Con equipo especializado (
heads--down
)
La forma tradicional de proceder a la digitalización manual
de entidades es utilizando equipos y periféricos
expresamente diseñados para llevar a cabo esta tarea. La
tableta digitalizadora
(Figura \ref{Fig:Tableta_digitalizadora}) es la herramienta
fundamental para este trabajo.
Se trata de una superficie plana a modo de atril, sobre la
cual se sitúa el documento cartográfico a digitalizar, y
sobre este se van trazando las distintas entidades con un
cursor. Este cursor registra los movimientos del operario,
convirtiendo las posiciones del cursor en coordenadas
reales, que son las que van a constituir la entidad
digitalizada. El trabajo del operario consiste en seguir con
el cursor las formas de las distintas entidades, como si las
estuviera calcando, de modo que indique al sistema las
geometrías que se quieren definir.
El proceso de digitalización implica los siguientes pasos [
Heywood1998Longman
]:
Registro
. La etapa fundamental del proceso, que garantiza que
las coordenadas de las entidades digitalizadas sean
correctas. El mapa se ha de adherir a la tableta de modo
firme, normalmente con cinta adhesiva u otro medio
similar, y señalar en él unos
puntos de control
de coordenadas conocidas. Será en base a estos como se
calcularan las restantes coordenadas de las entidades
que el operario defina mediante el cursor. Habitualmente
se utilizan como puntos de control las esquinas y algún
punto central del mapa. Es importante que en el proceso
de registro el mapa no presente dobleces o deterioros
que puedan inducir errores en el cálculo de coordenadas
posteriores.
Digitalización
. De entidades puntuales, lineales y poligonales.
Asignación de atributos
. A cada una de las entidades digitalizadas se le añaden
sus correspondientes propiedades. Este paso no se
realiza ya con la tableta digitalizadora. En el caso más
general, estos atributos se introducen manualmente con
el teclado o se toman, por ejemplo, de una base de
datos. Un caso particular, no obstante, es el de la
digitalización de curvas de nivel. Una vez que estas han
sido digitalizadas, no es necesario asignar valores
individualmente a cada una de las líneas, ya que entre
ellas existe una relación que puede aprovecharse para
simplificar el establecimiento de una cota
correspondiente a cada una. Estableciendo la elevación
de una y la dirección en que la elevación aumenta,
pueden sistemáticamente asignarse elevaciones a las
curvas que aparecen según se avanza en dicha dirección.
Los SIG más populares presentan habitualmente
herramientas que facilitan este proceso.
Esta forma de digitalizar se conoce como «cabeza abajo» (
heads--down
), en referencia a la posición del operario a la hora de
trabajar sobre la tableta.
Se distinguen dos formas principales de registro de puntos:
Manual
. El usuario debe ir marcando uno por uno todos los
puntos que desee incorporar a la entidad digitalizada.
Por ejemplo, para el caso de una línea, debe ir
deteniendo el ratón regularmente en aquellos puntos que
considere de interés, y sobre ellos pulsando los botones
del cursor para indicar al sistema que ha de registrar
dichos puntos.
Semiautomática
. El operario simplemente desliza el cursor definiendo
la forma de las entidades, y el propio sistema se
encarga de almacenar puntos regularmente según un
intervalo de tiempo definido. Esto permite un ahorro de
tiempo considerable y una correcta densidad de puntos
recogidos para cada entidad.
Las tabletas digitalizadoras son elementos caros, motivo por
el cual se tiende a favorecer en la actualidad la
digitalización en pantalla, que presenta además otra serie
de ventajas adicionales, como seguidamente veremos.
En pantalla (
heads--up
)
La otra forma de digitalizar elementos es utilizando las
capacidades de edición de un SIG. Estas capacidades son
heredadas de las aplicaciones de diseño asistido por
ordenador (CAD), y permiten «dibujar» en la pantalla del
ordenador entidades y formas tales como los puntos, líneas y
rectas que constituyen los objetos en el modelo de
representación vectorial.
En este proceso se parte igualmente de una capa base,
generalmente una imagen, y basándose en ella se van
definiendo los objetos, «dibujándolos» sobre la pantalla,
una vez más como si se calcara aquello que puede
visualizarse en dicha imagen. El hecho de que un SIG nos
permita tener varias capas simultáneamente y visualizarlas a
voluntad facilita el proceso de digitalización. También lo
facilita el poder tener varias imágenes sobre el fondo (cada
una de ellas como una capa individual), de modo que podemos
cubrir un área más amplia que la de una simple hoja de mapa
o una única imagen.
En este proceso, no partimos en realidad de un documento
cartográfico analógico, pues ya ha sido necesario
digitalizarlo de alguna forma para incorporarlo en un SIG.
El proceso es una digitalización de las entidades como
tales, pero la información ya ha de estar en formato
digital, aunque no en el modelo de representación vectorial,
sino en el modelo ráster. Por ello, puede utilizarse como
capa de partida una imagen originalmente en formato digital
o bien una imagen originalmente en formato impreso. En este
ultimo caso, la imagen ha debido digitalizarse previamente
mediante un proceso de
escaneo
, el cual se tratará en la siguiente sección.
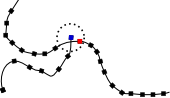
En la figura \ref{Fig:Digitalizacion_en_pantalla} puede
verse un ejemplo de la digitalización de una imagen en
pantalla. Sobre una imagen aérea en color, se digitalizan
las distintas parcelas que pueden distinguirse en esta. Del
mismo modo, pueden digitalizarse curvas de nivel en un mapa
escaneado, u otras entidades tales como ríos, lagos o vías
de comunicación sobre una fotografía aérea, entre muchas
otras.
Digitalización en pantalla. En rojo, polígono ya
digitalizado. Las líneas rojas indican un nuevo
polígono, actualmente en edición
$$\label{Fig:Digitalizacion_en_pantalla}$$
La digitalización en pantalla se conoce también como
digitalización «cabeza arriba» (
heads--up
), ya que el operador centra su atención en la pantalla, con
una postura bien distinta a la que se tiene al trabajar con
una tableta digitalizadora.
Frente a dicho trabajo con tableta digitalizadora, la
digitalización en pantalla tiene las siguientes ventajas:
Menor coste
. No se requiere equipo especializado de alto coste, ya
que basta con un ordenador personal.
Posibilidad de dividir el trabajo
. Cuando se trabaja con un mapa sobre una tableta
digitalizadora, este mapa no puede ser utilizado por
otro operario. Sin embargo, el uso de una capa digital
dentro de un SIG como base para la digitalización
permite que varios operarios trabajen con ella
simultáneamente y se repartan el trabajo.
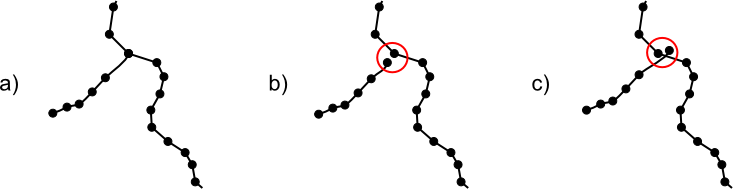
Posibilidad de corrección y edición precisa
. Las mismas capacidades que se usan para trazar las
distintas entidades pueden emplearse para corregir o
modificar estas una vez que han sido digitalizadas
(Figura \ref{Fig:Correccion_digitalizacion}), resultando
esto en un proceso de digitalización más flexible.
Posibilidad de ampliación
. Para cartografías de baja calidad, puede ser difícil
obtener precisión si se trabaja directamente sobre el
mapa, así como si los elementos a digitalizar son
pequeños, requiriéndose del operador un esfuerzo visual
adicional. Las capacidades que tiene todo SIG para
ampliar una imagen (
zoom
) permiten superar esta dificultad y trabajar a
distintas escalas según la precisión del trabajo a
realizar o las características de los objetos
digitalizados.
Mayor precisión
. La capacidad de resolución del ojo humano es mucho
menor que la resolución de las imágenes (véase más
adelante el apartado
Condiciones_digitalizacion
). Esto, unido a lo mencionado en el punto anterior,
permite aprovechar mejor la información de la fuente
original, y que los resultados obtenidos en la
digitalización de esta sean más fieles a ella.
Mayor comodidad para el operario
. La postura del operario es más adecuada cuando se
digitaliza sobre la pantalla, permitiendo unas mejores
condiciones. Esto que se traduce en menor cansancio y
ello indirectamente comporta resultados más precisos.
Corrección de entidades con las funciones de edición
de un SIG. El polígono de la derecha se encuentra en
edición, siendo modificado uno de sus vértices.
$$\label{Fig:Correccion_digitalizacion}$$
Para conocer con más detalle las capacidades básicas de
edición de un SIG, así como las restantes capacidades que
contribuyen a su vez a facilitar la labor de edición,
consúltese el capitulo
SIGs_escritorio
.
Digitalización automática
La digitalización automática limita el trabajo del operario,
ya que este no es responsable directo de definir las
propiedades de los elementos que se digitalizan. Este tipo
de digitalización es la habitual en el caso de generar una
capa ráster, aunque también pueden obtenerse capas
vectoriales procesando de modo automático cartografía
impresa.
Este segundo caso, no obstante, requiere una cartografía en
condiciones especiales, no siendo adecuada para todo tipo de
mapas. En caso de no presentarse esas condiciones, los
resultados de la digitalización no son óptimos, y requieren
posteriormente un gran trabajo de corrección y supervisión.
Escaneo
El escaneo es el proceso de digitalización que convierte una
imagen impresa (analógica) en una imagen digital [
Jackson1991Longman
]. El resultado de este proceso es, por tanto, y desde el
punto de vista de un SIG, una capa ráster. Pueden escanearse
tanto mapas como fotografías aéreas, operando en ambos casos
de un modo similar y con las mismas consideraciones, pues el
objeto del proceso es el mismo: la conversión del documento
impreso en un documento digital que pueda utilizarse dentro
de un SIG o cualquier otro software tal como, por ejemplo,
un software de tratamiento de imágenes.
El dispositivo fundamental para realizar este proceso es el
escáner
. Este se compone de una
cabeza
sobre la que se monta un sensor, y un soporte sobre el que
se desplaza o bien la cabeza o bien el documento a escanear,
de tal modo que durante el proceso de escaneo esta recorre
todo el documento, recogiendo la información de toda su
extensión.
Este proceso de
barrido
se realiza en una única ocasión, aunque dispositivos más
antiguos pueden hacerlo en tres ocasiones a la hora de
escanear documentos en color. Aunque lo habitual es la
creación de una imagen en color, también pueden obtenerse
imágenes en blanco y negro o en escala de grises.
Existen escáneres específicamente diseñados para el trabajo
con documentos cartográficos, pero son dispositivos muy
especializados y de coste elevado. Los escáneres más
genéricos, pensados para el trabajo con todo tipo de
imágenes y para todo tipo de usos, pueden no obstante
emplearse de igual modo para escanear tanto mapas como
imágenes aéreas con resultados aceptables, utilizándose con
frecuencia.
Existen tres tipos principales de escáneres:
De sobremesa
(
flat--bed
). Los habituales para el uso doméstico o el escaneo de
imágenes de pequeño formato, aunque también existen de
mayor tamaño. El documento a escanear se sitúa sobre una
placa de cristal bajo la que se desplaza la cabeza con
el sensor. Puede verse uno de estos escáneres en la
figura \ref{Fig:Escaner_sobremesa}.
Escáner de sobremesa (tomado de Wikipedia)
$$\label{Fig:Escaner_sobremesa}$$
De tambor
. El mapa se sitúa sobre un tambor que rota, mientras
que la cabeza se mantiene fija. La figura
\ref{Fig:Escaner_tambor} muestra uno de estos escáneres.
Escáner de tambor (fotografía: Stefan Kuehn)
$$\label{Fig:Escaner_tambor}$$
Alimentados
. El sensor se mantiene fijo y el documento se desplaza
mediante un mecanismo de arrastre, de forma similar a
como avanza el papel en una impresora doméstica. Salvo
que dispongan de mecanismos específicos para corregir
esta circunstancia, suelen presentar importantes
distorsiones geométricas causadas por un desplazamiento
impreciso del papel.
Los parámetros básicos que definen las características de un
escáner son la resolución espacial y la resolución
radiométrica. La primera de estas se mide habitualmente en
puntos por pulgada
y nos indica el número de puntos (celdas) que el sensor es
capaz de tomar por cada unidad de longitud sobre el papel.
La resolución radiométrica, por su parte, indica la
capacidad del sensor para distinguir entre dos colores
distintos.
A la hora de trabajar con documentos cartográficos de cara a
su posterior utilización en un SIG, tanto la resolución
espacial como la radiométrica de los escáneres habituales es
en general más que suficiente, incluso en ocasiones en
aquellos de uso doméstico. No obstante, es habitual que se
presenten distorsiones geométricas que suponen un problema
importante a la hora de mantener la precisión cartográfica,
y ello exige la utilización de equipos de mayor calidad si
se requiere un resultado de alta precisión. Estos equipos no
han de ser necesariamente de aquellos pensados para el
trabajo con cartografía, sino que pueden ser de uso
genérico, siempre, eso sí, que sean de la calidad necesaria.
La velocidad del escáner es otro parámetro importante, pues
la preparación de una base de datos cartográfica a partir de
cartografía analógica puede llevar un tiempo considerable si
el volumen de datos es elevado. El rendimiento del escáner y
la velocidad a la que puede digitalizar una imagen dada está
en relación directa con la resolución espacial. Un escáner
posee una resolución nominal (en dpi), que es la resolución
máxima a la que puede trabajar (el detalle máximo que puede
recoger). No obstante, puede ajustarse la resolución de
trabajo en función de las necesidades, y una resolución
mayor siempre lleva asociado un tiempo de proceso mayor, ya
que el volumen de información generado es mayor, así como el
detalle que ha de registrarse.
Para cada documento existe una resolución óptima de escaneo
en función de las características de este. Esta resolución
debe elegirse teniendo en cuenta que el volumen de datos
aumenta a medida que empleamos una mayor resolución,
buscando un equilibrio adecuado entre ese volumen de datos
resultante y la cantidad de información que recogemos.
Asimismo, se ha considerar igualmente el tiempo necesario
para escanear el documento, tal como se dijo anteriormente.
El parámetro base es la relación entre el tamaño de píxel
(la longitud real que representa el ancho de un píxel sobre
el terreno) y el tamaño de este píxel en la imagen (lo que
mide esa longitud en el mapa). Las resoluciones habituales
utilizadas para el escaneo de fotografías aéreas varían
entre los 100 dpi ($\approx 250 \mu m$ cada punto sobre el
mapa) y 2500 dpi (($\approx 10 \mu m$ cada punto sobre el
mapa) [
Welch1996Onward
]. Por ejemplo para una resolución de 300 dpi, se tiene:
Es decir, cada píxel del mapa representa sobre el terreno un
cuadrado de lado 4,24 metros.
Con cálculos similares podemos calcular para cada posible
resolución el espacio real que representa, y elegir esta en
función del detalle que necesitemos. Como regla general,
debe tratar de trabajarse con una resolución que garantice
que los objetos que resultan de interés de la imagen (por
ejemplo, aquellos que van a digitalizarse después
manualmente mediante una digitalización en pantalla con esa
imagen) sean distinguibles con claridad.
En el caso de imágenes aéreas, la resolución de estas medida
en pares de líneas por milímetro puede ser superior y
permitir escanear a mayor resolución, aunque ello no es
estrictamente necesario, y debe una vez más buscarse el
equilibrio entre las ventajas y los inconvenientes de
trabajar con una resolución más elevada.
En [
Welch1996Onward
] puede encontrarse información más detallada sobre la
elección de una resolución óptima en el escaneo de imágenes
aéreas.
Para el caso de mapas, no deben olvidarse los fundamentos
cartográficos en base a los cuales se ha creado dicho mapa,
que fueron detallados en el capítulo
Fundamentos_cartograficos
. Trabajar con una resolución más elevada no hace
necesariamente que estemos incorporando más información, ya
que esta puede no existir en el mapa original. Tendríamos un
volumen de datos más elevado que el necesario para recoger
toda la información del mapa.
Una diferencia fundamental entre escanear una hoja de un
mapa y una imagen aérea es la diferencia de tamaño. Los
mapas suelen tener tamaños mucho mayores que los de un
escáner común, lo cual obliga a utilizar equipos de gran
formato o, en la mayoría de los casos, contratar servicios
de escaneo especializados, ya que estos equipos tiene un
coste muy elevado.
Una solución distinta en el caso de mapas de gran tamaño es
el escaneo de la hoja por partes y la posterior unión de las
distintas partes. En este caso, es necesario asegurarse de
que las partes son coherentes entre sí en lo que respecta a
las condiciones bajo las que se realiza el escaneo, así como
garantizar que las distintas partes se solapan para que no
existan zonas sin datos en la imagen resultante. Además de
esto, el solape facilita la localización de puntos comunes
presentes entre partes contiguas, lo que ayuda en la
composición de todas las partes para dar lugar al resultado
global.
Otra diferencia entre trabajar con mapas e imágenes es la
relativa al tipo de soporte. En el caso de mapas, el
documento original se encuentra siempre impreso en papel. En
el caso de fotografías aéreas puede presentarse tanto en
papel como en diapositiva. Los escáneres están preparados
para capturar la imagen tanto por
reflexión
(cuando se trabaja con un documento en papel) como por
transmisión
(cuando se trabaja con una diapositiva o cualquier otro
soporte transparente), por lo que ambos tipos de fuentes
pueden utilizarse indistintamente para generar una imagen
digital, siendo esta diferencia menos relevante a efectos
prácticos.
Por último, un aspecto clave en el escaneo de cartografía es
la asignación de coordenadas a la capa resultante. Cuando
utilizamos una tableta digitalizadora, debemos definir los
puntos de control
, que son los que establecen la referencia geográfica en
base a la cual se calculan las coordenadas de los elementos
que digitalizamos con el cursor. En el caso de escanear un
mapa o una fotografía aérea, esa información está presente
en el mapa en forma de marcas fiduciales o una retícula con
coordenadas impresas, pero no se digitaliza como tal.
Si simplemente escaneamos el documento, se digitaliza la
marca fiducial o la etiqueta que indica las coordenadas,
pero tan solo como una imagen, y no como un dato
aprovechable por el SIG para otras tareas. En esta imagen,
un operador puede ver las coordenadas de un punto, pero si
realizamos un proceso de digitalización vectorial en
pantalla utilizando esa imagen, el SIG no tiene forma de
calcular las coordenadas de los puntos que introducimos,
pues carece de una referencia.
Para que una imagen procedente del escaneo de un documento
impreso tenga plena validez y utilidad dentro de un SIG, es
necesario añadirle información sobre la localización en el
espacio del área representada en dicho documento. Este
proceso se denomina
georreferenciación
.
La georreferenciación es un proceso tratado dentro de este
libro en el apartado
Rectificacion
, puesto que no es puramente un proceso que forme parte de
la adquisición de datos, sino un tratamiento a aplicar una
vez que el proceso de digitalización ha sido realizado.
Vectorización automática
La vectorización automática es un proceso completamente
distinto al de escaneo, y no es tan habitual en el ámbito de
los SIG, principalmente debido a la mayor dificultad que
entraña. Como resultado de este proceso, se obtiene una capa
vectorial, pero, a diferencia de la vectorización manual, el
operario no tiene que señalar los puntos de estas o trazar
los contornos de las entidades.
Existen distintos procesos de vectorización automática,
entre los que distinguiremos los siguientes:
Vectorización en base a una imagen digital, por
reconocimiento de entidades en un software apropiado.
Vectorización mediante dispositivos específicos que
trabajan sobre un documento analógico.
En el primer caso, partimos de una imagen digital, que puede
proceder o no de un proceso de escaneo. Sobre esta imagen se
aplican algoritmos que identifican de modo automático las
distintas entidades y crean los correspondientes objetos
vectoriales.
El mayor inconveniente de esta técnica es que requiere que
la imagen tenga unas condiciones especiales, pues de otro
modo es difícil que esos algoritmos de identificación den
resultados correctos. En ocasiones pueden crear entidades
donde estas no existen o bien ignorar algunas por no ser
capaces de detectarlas, así como crear entidades de forma y
tamaño incorrectos. El trabajo de digitalización por parte
del operario desaparece, pero es necesario un trabajo
posterior de comprobación y corrección, que en función de
las características de la imagen de partida puede ser
importante.
Esta forma de vectorización automática es, al igual que la
georreferenciación, un proceso a llevar a cabo sobre la
imagen. Por esta razón, no se trata en este capítulo sino en
el capítulo
Procesado_imagenes
dedicado al tratamiento de imágenes. Igualmente, el capítulo
Creacion_capas_vectoriales
, dedicado a la conversión entre capas ráster y vectoriales,
incluye información acerca de procesos de vectorización
automática, con particular atención a la conversión de un
mapa escaneado en una capa vectorial de curvas de nivel.
La otra forma de digitalización es totalmente diferente y no
se realiza en el ordenador, sino en un periférico externo a
este, tal como una tableta digitalizadora o un escáner. El
dispositivo en cuestión es más similar a un escáner que a
una tableta digitalizadora, pero su comportamiento imita al
de un operario trabajando sobre esta última.
Para ello, dispone de sensores luminosos y de láser que
buscan las líneas en la imagen y las recorren, almacenando
las coordenadas por las que han pasado en el recorrido. De
este modo, se genera un resultado vectorial en lugar de uno
ráster. El barrido de la imagen no es sistemático como el de
un escáner, sino que «sigue» las líneas que están presentes
en la imagen, y que son las que van a digitalizarse.
Al igual que con la digitalización automática, las buenas
condiciones de la imagen de partida son básicas para obtener
resultados de calidad. En un mapa es habitual que las líneas
se vean interrumpidas por etiquetas (por ejemplo, para
indicar la altura de una curva de nivel), o bien están
dibujadas en trazo punteado, o bien puede aparecer alguna
mancha sobre ellas. Este tipo de elementos dificultan o
incluso imposibilitan el correcto funcionamiento del
dispositivo, ya que este no puede seguir las líneas
adecuadamente, lo cual da lugar a resultados de poca
calidad.
Digitalización a partir de coordenadas. Geocodificación
Junto a las formas de digitalización que acabamos de ver,
existe una forma aún más básica: la digitalización directa
de valores y coordenadas, sin necesidad alguna de
dispositivos especializados o elementos gráficos. En este
tipo de digitalización no existe un mapa o documento
cartográfico, sino simplemente una serie de datos espaciales
expresados de forma alfanumérica que son susceptibles de
convertirse en una capa y emplearse así dentro de un SIG.
Este proceso se conoce como
geocodificación
[
Davis2003Geoinfo
] e implica la asignación de coordenadas a puntos de
interés, los cuales pueden ser de naturaleza muy variada.
Asimismo, la procedencia de estos datos también puede ser
diversa, y en general muchas formas de trabajo en campo dan
lugar a datos que, aún no estando originalmente dispuestos
sobre mapas, sí que pueden emplearse como base para la
creación de capas. Algunos ejemplos son los siguientes:
Muestreos de campo tales como la medición de parcelas en
un inventario forestal. Cada parcela tiene una
coordenada correspondiente a su centro, y los árboles
medidos se referencian con un rumbo y una dirección en
base a ese centro.
Calicatas para análisis de suelo
Levantamientos topográficos con instrumentación tanto
analógica como digital. Existe un conjunto de
instrucciones y procedimientos denominado COGO (
COordinate GeOmetry
), que facilita el trabajo con datos en forma de
distancias y ángulos, de forma que las mediciones
efectuadas a lo largo de un recorrido empleando un
equipo tal como una estación total, un teodolito o un
nivel con una mira, todos ellos pueden posteriormente
convertirse con sencillez a coordenadas mediante la
incorporación al SIG de ese conjunto de valores.
Coordenadas en las que han sucedido algún tipo de
sucesos. Por ejemplo, la geocodificación de
localizaciones en las que han tenido lugar sucesos
criminales permite posteriormente el análisis de su
distribución y el establecimiento de políticas de
seguridad más acordes con el escenario real.
Coordenadas de cierto tipo particular de elementos,
tales como elementos arquitectónicos, árboles
singulares, paradas de autobús. Estas permiten la
localización rápida de estos y una fácil catalogación,
además de, en conexión con otras capas, cálculos como,
por ejemplo, la forma más rápida de desplazamiento hasta
uno de ellos.
Coordenadas correspondientes a otras formas de
codificación espacial. Sistemas de localización espacial
tales como códigos postales o, por ejemplo, los sistemas
de indexación espacial CGDG o
c-squares
, pueden todos ellos vincularse a coordenadas
geográficas, de tal modo que a cada uno de los códigos
de estos sistemas se le asigne una de tales coordenadas.
En la actualidad, Internet está viendo aparecer
tendencias relacionadas con la asignación de una
localización geográfica a muchos de sus elementos. Así,
puede añadirse a una página Web información sobre el
emplazamiento donde ha sido creada, o añadirla a una
fotografía digital. Los datos con los que trabajamos en
la Web (textos, imágenes, etc.) llevan asociados a su
vez otros datos (metadatos) con información sobre su
localización. El proceso de añadir estos metadatos se
conoce como
geotagging
.
Todos estos datos presentan en común que, recogidos de un
modo u otro, conforman un conjunto de coordenadas puntuales
que habitualmente sirven para el trabajo fuera de un SIG y
no llegan a incorporarse a este, o que al menos no están
dispuestos en la forma habitual de capa con la que
trabajamos en un SIG.
En el caso de encontrarse en formato analógico, estos datos
pueden digitalizarse mediante la simple introducción manual
de coordenadas a través del teclado o bien mediante algún
sistema más específico como el escaneo del documento y el
empleo de algún software de reconocimiento de caracteres
(OCR).
En el caso de encontrarse ya en formato digital, estos datos
pueden presentarse como tablas en una hoja de cálculo, datos
asociados a otro dato de cualquier tipo (como en el caso del
geotagging
) o incluso simples archivo de texto. Muchos SIG incorporan
métodos para leer estos archivos y después utilizar las
coordenadas que contienen con el fin de crear una nueva
capa, en general de puntos.
Un caso particular de la creación de puntos con coordenadas
es la asignación de direcciones dentro de núcleos urbanos,
tales como direcciones postales o códigos postales. Estas
direcciones son de especial importancia en el desarrollo de
actividades dentro del entorno urbano, ya que es más
habitual referirse al emplazamiento de un determinado
elemento (por ejemplo, un comercio) en términos de su
dirección postal que en coordenadas espaciales tales como
las que se manejan en un SIG. La geocodificación de estos
elementos implica establecer una coordenada geográfica
correspondiente a cada dirección postal.
Fotogrametría
Un caso particular de digitalización lo encontramos en la
fotogrametría
. En la definición clásica de [
Bonneval1972Eyrolles
], esta se define como la técnica para estudiar y definir
con precisión la forma, dimensiones y posición en el espacio
de un objeto cualquiera, utilizando medidas realizadas sobre
una o varias fotografías. Esta definición no limita el
alcance de la fotogrametría al ámbito de lo geográfico, y se
utilizan sus principios en campos tales como la arqueología
o la documentación de obras y monumentos, empleando para
ello fotografías no aéreas, sino terrestres. Es la
denominada
fotogrametría terrestre
. No obstante, la rama de interés para este libro es la de
la
fotogrametría aérea
, cuya base de trabajo tradicional son las fotografías
aéreas.
Esta clase de fotogrametría viene, pues, ligada íntimamente
a los inicios de la teledetección, cuando los sensores
modernos que hemos estudiado antes en este mismo capítulo no
se habían desarrollado, y los existentes (básicamente
cámaras fotográficas especialmente adaptadas a la toma de
fotografías de tipo cartográfico) se montaban a bordo de
aviones.
Históricamente, el término
teledetección
aparece con posterioridad, una vez que las técnicas de toma
de imágenes avanzan y dan un gran salto cualitativo con la
aparición de las imágenes satelitales y los sensores
electro--ópticos que ya conocemos. Algunos autores engloban
la fotogrametría dentro de la teledetección, mientras que
otros se refieren con el termino teledetección a las
tecnologías más actuales y las consideran disciplinas
distintas aunque muy relacionadas. Junto con la
fotogrametria aérea aparece la fotogrametría espacial,
encargada de operar sobre imágenes de satélite bajo unos
principios similares.
Dentro de este libro entenderemos por teledetección todo el
conjunto de técnicas y operaciones de obtención de imágenes
(que ya conocemos), así como las de tratamiento y posterior
extracción de resultados a partir de estas (que iremos
viendo en otros capítulos), obteniéndose estos resultados
sin necesidad de establecer contactos con los objetos a
estudiar, como corresponde a la definición dada en el
apartado correspondiente. Dentro de ese conjunto de
operaciones que nos llevan desde las imágenes a los
resultados, entendemos como parte de la fotogrametría
aquellas que tienen relación con la acepción original del
término, es decir, aquellas que derivan de la medición de
elementos.
La denominación, no obstante, no es tan relevante, y sí lo
es sin embargo comprender la importancia de ambas,
particularmente dentro de este capítulo como técnicas de
producción cartográfica.
En lo que respecta a la fotogrametría, el proceso de
restitución
es el que interesa principalmente para el contenido de este
capítulo, pues ofrece como resultado nuevas capas de datos
tanto bidimensionales como, especialmente, tridimensionales.
Así, pueden obtenerse tanto las capas vectoriales
digitalizadas que veíamos por ejemplo en el apartado
Digitalizacion_manual
, como directamente Modelos Digitales de Elevaciones a
partir de imágenes.
En realidad, los procesos de digitalización que ya hemos
visto son también parte de la fotogrametría digital, y es
habitual encontrarlos en los textos al uso sobre esta.
También lo son los procesos de rectificación que se han
citado en su momento, y que analizaremos en detalle más
adelante en el capítulo
Procesado_imagenes
. Como puedes ver, todas las técnicas están sumamente
relacionadas, y las divisiones que hacemos pueden ser unas u
otras en función del enfoque que se dé para su estudio
Todas estas operaciones se llevan a cabo con una
estación fotogramétrica
, que comprende las herramientas necesarias para llevar
estas a cabo (algunas, como los escáneres, ya las
conocemos). En función del tipo de herramientas y técnicas
distinguimos los siguientes tipos de fotogrametría, que
representan a su vez la evolución de la disciplina.
Fotogrametría
analógica
. Basada en mediciones y procedimientos sobre imágenes
analógicas
Fotogrametría
analítica
. Basada en formulaciones matemáticas y técnicas
computacionales, permite obtener grandes precisiones.
Fotogrametría
digital
. Basada en el trabajo con imágenes digitales dentro de
un entorno informático.
El interés principal desde el punto de vista de los SIG es
en la fotogrametría digital, ya que existe una gran relación
entre estos y las aplicaciones empleadas en dicho tipo de
fotogrametría. Es en esta en la que pueden englobarse los
procesos de digitalización que ya hemos visto, y no en las
restantes formas más antiguas de fotogrametría. En la
fotogrametría digital, la estación fotogramétrica se
articula sobre un ordenador en el cual se llevan a cabo los
distintos procesos, no existiendo operaciones externas al
mismo. Así, las imágenes se manejan dentro del ordenador y
se visualizan a través de él, y la generación de nueva
cartografía también se produce de forma digital.
Esto no es muy diferente de lo que veíamos en el caso de la
digitalización en pantalla algunas paginas atrás, pero el
trabajo fotogramétrico engloba otros procesos además de los
que ya hemos visto. Uno de ellos es la generación directa de
cartografía de elevaciones, para la cual se requiere que el
equipo empleado disponga de algunos elementos adicionales.
Es decir, la estación fotogramétrica digital es más compleja
que un simple ordenador, un dispositivo de marcado (un
ratón) y un SIG, que eran los requisitos básicos para
digitalizar en pantalla una imagen.
Una estación fotogramétrica digital ha de tener, por
ejemplo, capacidad para generar visualizaciones con
sensación de profundidad a partir de pares de imágenes, que
son las que permiten la posterior digitalización de los
elementos con sus elevaciones correspondientes. Los
principios en los que se basan este tipo de visualizaciones
son los mismos empleados en la fotogrametría no digital,
fundamentados en la visión estereoscópica.
La visión tridimensional en el ser humano se basa en el
hecho de que la imagen que ve cada ojo es ligeramente
distinta a la del otro, lo cual permite al cerebro extraer
información volumétrica y generar una verdadera visión
tridimensional. En el caso de la fotogrametría, si en lugar
de utilizar una única imagen aérea o de satélite empleamos
dos, cada una de ellas tomada desde un punto distinto,
resulta posible recrear el efecto que ambas imágenes
tendrían para la reconstrucción tridimensional de la escena,
y «engañar» al cerebro del observador para que este pueda
observar la escena con volumen y profundidad.
Cuando se emplean imágenes de satélite, los pares se pueden
obtener con aquellas plataformas y sensores que permiten
variar el ángulo de visión, de modo que en la misma pasada
del satélite se toman imágenes de una zona desde distintos
puntos. El sensor toma una imagen cenital y posteriormente,
una vez ha superado la zona en su recorrido, toma una
segunda imagen mirando «hacia atrás», la cual, combinada con
la primera, permite el levantamiento del terreno y la
realización de los procesos fotogramétricos (Figura
\ref{Fig:Par_estereo_satelite}).
Toma de pares de imágenes estereosópicas desde un
satélite, mediante variación del ángulo de visión.
$$\label{Fig:Par_estereo_satelite}$$
El sensor HRS que montan los satélites SPOT, o el sensor
ASTER, ambos son capaces de tomar este tipo de imágenes.
Las formas de conseguir que el observador perciba la
profundidad de la escena a partir de las imágenes son
variadas, y van desde el uso de sencillos instrumentos
ópticos o la generación de anaglifos (imágenes que combinan
la información del par estereoscópico y que se han de
observar con gafas con filtros distintos para cada ojo),
hasta otras técnicas más complejas y elaboradas. En la
fotogrametría no digital, el empleo de restituidores
analíticos ha sido la metodología habitual. En la
fotogrametría digital, este puede sustituirse por un equipo
con dos monitores, cada uno de los cuales muestra una de las
imágenes del par, y se emplean gafas especiales que son las
encargadas de generar en el observador la sensación de
profundidad .
Además de lo anterior, la estación fotogramétrica digital
dispone de periféricos específicos tales como ratones 3D, o
manivelas como las que presentan los restituidores
analíticos, facilitando así la adaptación de los operarios a
este tipo de estación.
Por último el software que implementan, y que es el
encargado de representar las imágenes y acoger el proceso de
digitalización, suele ser específico, y es frecuente que se
distribuya como parte de toda una estación fotogramétrica
compuesta por los elementos reseñados anteriormente. Algunos
SIG incorporan progresivamente capacidades adaptadas de este
tipo de programas, pero por el momento la labor
fotogramétrica queda reservada para este tipo de
aplicaciones específicas, siendo el SIG tan solo un
beneficiario directo de sus productos.
Calidad de la digitalización
Uno de los aspectos más importantes del proceso de
digitalización es la calidad del resultado obtenido, que
debe tratar de ser lo más cercana posible a la calidad
original de la información que se digitaliza, es decir, del
mapa o imagen original. Independientemente de la precisión
del equipo utilizado o la habilidad y experiencia del
operario, la digitalización no es por completo perfecta,
conteniendo siempre ciertas deficiencias y errores.
Además de los errores que puedan incorporarse en las
distintas fases del proceso de digitalización (sea este del
tipo que sea), hay que considerar que las fuentes originales
a digitalizar también pueden incluir los suyos propios. Así,
el proceso de escaneado puede incorporar distorsiones
geométricas, pero es posible que el mapa o fotografía aérea
de partida también presente alguna distorsión como
consecuencia de su deterioro, más patente cuanto más antigua
sea esta.
La información contenida en el documento cartográfico puede
también contener elementos problemáticos de cara a obtener
un producto de calidad, que pueden ir desde líneas borradas
total o parcialmente a manchas en el propio mapa derivadas
de su uso habitual [
Heywood1998Longman
].
Dentro de los errores que aparecen como consecuencia de la
digitalización en sí, un tipo importante de ellos son las
discrepancias y coincidencias imperfectas entre las
distintas entidades, tal como las que se muestran en la
figura \ref{Fig:Imprecisiones_digitalizacion}
Errores derivados del proceso de digitalización. a)
Versión correcta, con nodos coincidentes. b) y c)
Versiones con errores que causan una falsa
desconexión entre las líneas.
$$\label{Fig:Imprecisiones_digitalizacion}$$
Estas imprecisiones son causantes de numerosos problemas,
tales como la aparición de polígonos espúreos en las
operaciones de solape entre capas vectoriales, que veremos
en el capítulo
Operaciones_geometricas
.
Debido a esto, las capacidades de edición de los SIG
incorporan funcionalidades que permiten evitar estos errores
en el momento de la digitalización, ayudando al operario en
su tarea y permitiéndole alcanzar una exactitud y precisión
imposible de lograr sin estas funcionalidades. Entre ellas,
es especialmente importante el establecimiento de
tolerancias y ajuste automático en función de ellas (esto se
conoce con el término ingles
snapping
), que ayudan a garantizar la coincidencia entre los
distintos vértices.
De este modo, polígonos adyacentes o líneas que se cortan en
un punto dado lo hacen con total exactitud. Dichos polígonos
comparten exactamente el mismo lado con las mismas
coordenadas exactas, o se cruzan en el mismo e idéntico
punto, y no únicamente pasan por un punto cercano (pero
distinto) definido con la precisión con la que el operador
haya podido ajustar ambas entidades visualmente. La
coincidencia no es solo visual, sino numérica. La figura
\ref{Fig:Snapping} muestra un ejemplo de la utilización de
snapping
en un proceso de digitalización.
Ajuste automático mediante tolerancia(
snapping
). El nodo azul representa el nodo en edición. La
tolerancia de enlace queda marcada por el circulo
punteado. Puesto que el nodo rojo de la línea
preexistente se encuentra dentro de esa tolerancia,
al añadir el nuevo nodo (azul), este automáticamente
se situará en las coordenadas del nodo rojo,
garantizándose así la coincidencia.
$$\label{Fig:Snapping}$$
Mediante estas funcionalidades, el operador simplemente
selecciona un punto, y el sistema digitalizador lo desplaza
para que coincida con el punto existente más cercano,
siempre que se encuentre a menos distancia que la tolerancia
establecida de antemano.
El hecho de que exista una completa coincidencia es
especialmente importante cuando la capa vectorial que se
digitaliza contiene información topológica. La topología
exige que la coincidencia sea correcta y defina
perfectamente la relación entre las entidades. Para los
ejemplos b) y c) de la figura
\ref{Fig:Imprecisiones_digitalizacion}, las líneas no están
conectadas ya que no existe coincidencia en el nodo. Si los
puntos están suficientemente cercanos, puede «parecer» que
son coincidentes, pero el SIG no los detectará como tales y
no se podrá llevar a cabo ningún análisis topológico con
esas líneas (por ejemplo, suponiendo que representan vías de
comunicación y se quiere hacer un análisis de redes con
ellas).
La digitalización de entidades en caso de querer recoger su
topología debe obedecer una serie de reglas, a saber:
Las líneas deben cruzarse en nodos, en caso de que
exista relación (conexión) entre ellas.
Las líneas que coinciden en un nodo común deben
coincidir exactamente. Las funciones de
snapping
se han de utilizar por ello durante la digitalización.
Los lados comunes de los polígonos deben digitalizarse
una única vez.
Las áreas deben ser cerradas (el primer punto ha de
coincidir exactamente con el último). Las funciones de
snapping
o el cierre automático de líneas (asignar
sistemáticamente al último punto del contorno del
polígono las coordenadas del primero) deben emplearse
para ello.
Todos los aspectos relativos a la calidad de datos, entre
los cuales se incluyen los relacionados con los errores del
proceso de digitalización, se tratan con mayor profundidad
en el capítulo
Calidad_datos
.
GPS
Uno de los hitos en la aparición de nuevas fuentes de datos
geográficos es la aparición de los
Sistemas Globales de Navegación por Satélite
(GNSS), que permiten la obtención de coordenadas geográficas
de un modo inmediato, con las consecuencias que esto tiene
para su uso en actividades como la elaboración de
cartografía.
En esencia, un GNSS es un sistema que permite conocer en
todo momento y en cualquier punto del globo la localización
exacta de dicho punto con un margen de error del orden de
unos pocos metros o menos. Para ello, se basan en el envío
de señales entre un dispositivo situado en el punto concreto
y una red de satélites, pudiendo establecerse la posición
exacta mediante las características de dicha transmisión.
El ejemplo más extendido de un GNSS es el Sistema de
Posicionamiento Global (Global Positioning System, o GPS),
originalmente puesto en funcionamiento por el Departamento
de Defensa de los Estados Unidos. Existen otros GNSS
operativos tales como el GLONASS ruso, el COMPASS chino o el
Galileo
europeo)
Fundamentos del sistema GPS
El sistema GPS se divide en tres subsistemas o
segmentos
:
Segmento espacial
. Lo componen los satélites de la constelación GPS (un
total de 27, siendo 24 de ellos operativos y 3 de
reserva), con los cuales se comunican las unidades
receptoras, y en función de los cuales puede
triangularse la posición actual de estas.
Segmento de control
. Lo forman un conjunto de estaciones terrestres que
controlan el funcionamiento de los satélites, pudiendo
enviar señales a estos para modificar su comportamiento.
Segmento de usuarios
. Lo conforman los receptores GPS y todos los
dispositivos que hacen uso de la señal de los satélites
para el cálculo de posiciones.
Los satélites del segmento espacial emiten una señal
compleja cuyo contenido puede dividirse esencialmente en dos
bloques de información:
Señales empleadas para el cálculo de distancias
. Estas incluyen dos códigos: P(Precise) y C/A
(Coarse/Aquisition). El segundo de ellos es el empleado
habitualmente, ya que el primero se encuentra encriptado
y está pensado para uso militar, mientras que el C/A
esta disponible para todos los usuarios.
Mensajes de navegación
. Estos informan de la posición orbital del satélite
(conocida como
efeméride
), y pueden asimismo contener información adicional
referente al segmento espacial.
Las señales para el cálculo de distancias (en la
terminología GPS estas distancias se conocen como
pseudodistancias
) se envían mediante una onda portadora conocida como L1,
correspondiente a una frecuencia de 1575,42 MHz . El código
P se envía además en una segunda portadora denominada L2,
con una frecuencia de 1227,60 MHz.
El funcionamiento del sistema se basa en la triangulación de
la posición mediante las señales procedentes de un cierto
número de los satélites. Esta posición se calcula no
únicamente en sus coordenadas
x
e
y
, sino también en
z
, es decir en elevación. El sistema GPS emplea como sistema
geodésico de referencia el WGS84 [
WGS84
]. La precisión en el cálculo de la elevación es menor que
la correspondiente a las restantes coordenadas, aunque
también es de utilidad y puede emplearse en aplicaciones que
van desde levantamientos y replanteos a usos en tiempo real
como el cálculo de elevación en vuelos [
Graas1991Navigation
].
La posición de los satélites es conocida en todo momento, y
los propios satélites informan de ella a los receptores a
través de los mensajes de navegación. En base a esas
posiciones orbitales, el proceso de triangulación que se
lleva a cabo en el sistema GPS no se basa en el trabajo con
ángulos, sino con distancias (aunque es habitual hablar de
triangulación, en realidad se trata de una
trilateración
).
El cálculo de la distancia puede realizarse utilizando la
información de las señales (los códigos C/A o P), o bien
empleando las propias portadoras. El primer método es más
sencillo y rápido, ya que no es necesario que el receptor
«escuche» la señal durante un periodo prolongado de tiempo,
lo cual sí es necesario en el segundo, como a continuación
veremos.
En el caso de emplear la portadora, se mide el desfase entre
esta y una señal generada por el receptor, lo cual permite
calcular una parte de la distancia (la que es menor que la
longitud de onda de la señal). La distancia total es igual a
esta parte calculada más un numero entero de veces la
longitud de onda. El valor de este numero entero es, no
obstante, desconocido. Su cálculo se conoce como
resolución de la ambigüedad
(AR), y requiere escuchar la señal del satélite durante un
cierto tiempo para recopilar datos suficientes que permitan
el cálculo del valor antedicho.
Así, la resolución de la ambigüedad es la que hace necesario
un tiempo de
inicialización
de la unidad, con objeto de conocer esa constante en el
desfase. Si la unidad pierde contacto con el satélite, es
necesario de nuevo proceder a la resolución de las
ambigüedades, quedando el receptor inoperativo durante ese
periodo de tiempo. Más detalles sobre la resolución de la
ambigüedad en el sistema GPS puede encontrarse en [
Torrecillas1998Mapping
].
Puesto que la velocidad a la que la señal se desplaza es muy
elevada, se requieren relojes muy precisos para poder medir
con precisión los tiempos tan cortos que tarda dicha señal
en recorrer la distancia entre satélite y receptor. A bordo
de los satélites se montan relojes atómicos de muy alta
precisión, pero las unidades receptoras no disponen de
relojes tan precisos. Es por este motivo que, como veremos,
han de introducirse correcciones y cálculos adicionales con
el fin de obtener mayores precisiones en la medida del
tiempo.
Si el receptor es capaz de establecer comunicación con tres
satélites, dispone ya de información suficiente para conocer
su posición $(x,y)$ como intersección de las esferas
centradas en cada uno de dichos satélites y con radio la
distancia existente entre este y el receptor. Con cuatro
satélites se puede ya obtener la posición $(x,y,z)$.
Un número mayor de satélites (cuatro al menos) es necesario,
no obstante, para eliminar las imprecisiones debidas a los
distintos elementos implicados, y se emplean habitualmente
modelos más complejos que utilizan los datos de múltiples
satélites y efectúan correcciones en función de ellos. Las
deficiencias de los relojes que emplean los receptores
pueden corregirse mediante la utilización de nuevos
satélites, que permiten calcular con exactitud el tiempo,
variable de gran importancia en el proceso y sin la cual no
se pueden obtener precisiones elevadas.
Los receptores actuales están preparados para trabajar con
un número máximo de satélites habitualmente igual a 12, por
lo que en todas circunstancias tratan de localizar el mayor
número posible de satélites con objeto de lograr una mayor
precisión.
El diseño de la red de satélites está pensado para
garantizar que en cualquier punto de la superficie terrestre
y en cualquier momento, un receptor puede localizar el
número necesario de satélites para obtener con exactitud su
precisión. La localización en la que se disponen los
satélites con los que se establece comunicación no es
irrelevante, ya que condiciona la precisión del
posicionamiento, afectando a lo que se conoce como
dilución de la precisión
(DOP). Si los ángulos de los satélites son grandes, la
precisión que se obtiene es mayor que si estos son menores
(Figura \ref{Fig:DOP}).
Dilución de la precisión. La geometría de los
satélites en el ejemplo a) da una mayor precisión en
el cálculo de la posición del receptor que la del
ejemplo b).
$$\label{Fig:DOP}$$
Junto a esto, existen otras muchas fuentes de error en el
sistema GPS, cada una de las cuales afecta a la precisión
del mismo. Entre ellas, cabe destacar las siguientes:
Errores en la posición de los satélites.
Errores por el rebote de la señal en otros elementos
tales como edificios, con anterioridad a alcanzar el
receptor.
Errores derivados del paso de la señal por la atmósfera.
Al atravesar la ionosfera y la troposfera se genera un
retraso por la alteración que dicho paso produce sobre
la señal.
Errores en la precisión de los relojes, ya mencionados.
Disponibilidad selectiva
. Debido a su concepción como una herramienta militar,
el departamento de Defensa de los Estados Unidos,
propietario del sistema, introducía errores aleatorios
en las señales, de tal forma que esta quedaba degradada
y los usuarios civiles no podían obtener una precisión
muy elevada. La disponibilidad selectiva fue eliminada
en el año 2000.
En conjunto, todos estos errores suman desviaciones
apreciables, que sin embargo pueden corregirse con la
aplicación de técnicas adicionales, por ejemplo incorporando
información adicional procedente de otros receptores. Una de
estas técnicas es el denominado
GPS diferencial
, pensado en origen para eliminar el error de la
disponibilidad selectiva, aunque también eficaz para
corregir una buena parte los restantes errores citados
anteriormente.
Para la aplicación del GPS diferencial se requiere no solo
un receptor único (aquel del cual se quiere calcular su
posición), sino también otro receptor fijo de referencia
cuyas coordenadas se conocen con gran precisión. Este
receptor fijo es, a su vez, un receptor de alta precisión y,
además de calcular su propia posición, emite información que
las unidades receptoras pueden aprovechar para corregir sus
mediciones. El receptor móvil, lógicamente, tiene que
soportar este tipo de correcciones, para poder hacer uso de
la señal de la estación de referencia.
Los datos que permiten llevar a cabo la corrección puede
obtenerse en el receptor mediante radio, descargarse por
Internet mediante una conexión inalámbrica, o bien utilizar
una constelación de satélites adicional dedicada a elaborar
y servir este tipo de datos.
La corrección puede realizarse fuera del propio receptor, a
posteriori, utilizando software adecuado y los mismos datos
de corrección que si se realiza la corrección en tiempo
real.
El fundamento de este sistema es que los errores que afectan
al receptor móvil también afectan al de referencia. La
magnitud del error que afecta al receptor de referencia
puede conocerse, ya que se conoce la coordenada exacta de
este, y en base a eso puede eliminarse el error que afecta
al receptor móvil, asumiendo que ambos errores son de
similar índole.
En la actualidad, aplicando estas técnicas de corrección
diferencial, un GPS puede obtener precisiones del orden de 2
metros en latitud y longitud, y 3 en altitud. Sin corrección
diferencial, esta precisión es de unos 10--20 metros.
La figura \ref{Fig:DGPS} muestra un esquema del
funcionamiento del GPS diferencial.
Esquema de funcionamiento del GPS diferencial
$$\label{Fig:DGPS}$$
Tipos de receptores
La precisión del sistema global GPS depende del tipo de
receptor GPS (o, en el lenguaje común, GPS a secas) que se
emplee, obteniéndose mayores precisiones con receptores más
avanzados, siempre dentro de las posibilidades del propio
sistema.
En función de sus características y de la forma en que
operan, podemos distinguir los siguientes tipos de
receptores GPS:
Receptores secuenciales
. Establece conexiones secuenciales con los distintos
satélites disponibles, estando conectado a uno o dos a
lo sumo simultáneamente. Estos receptores son más
económicos, ya que esta forma de operar requiere equipos
menos complejos, aunque la precisión que se obtiene
también es menor.
Receptores continuos
. Disponen de más canales de radio que los anteriores y
ello permite que la conexión a los satélites sea
continua, sin tener que alternar entre uno y otro. La
precisión que se obtiene es mayor, pero se trata de
equipos más caros.
Receptores con canales multiplexados
. El esquema de funcionamiento es similar al secuencial,
alternando entre los distintos satélites y utilizando un
único canal. No obstante, utilizan software más complejo
y procesadores más potentes, de forma que esta
alternancia se puede producir con una frecuencia mucho
más elevada.
A día de hoy, es habitual que incluso los GPS de menor coste
tengan múltiples canales, permitiendo la conexión continua
con un número elevado de satélites.
Como hemos visto, las señales emitidas por los satélites
contienen dos códigos (C/A y P) que se transmiten modulados
sobre dos ondas portadoras distintas (L1 y L2). No todos los
receptores GPS son capaces de utilizar estos elementos de
las señales, y en función de ello podemos también
clasificarlos.
Los más sencillos únicamente basan sus cálculos en el código
C/A, mientras que los más avanzados y complejos son capaces
de utilizar el código P (encriptado, por lo que es necesaria
una clave correspondiente), así como las portadoras para un
cálculo más preciso, según se explicó en un punto anterior.
Por último, y teniendo en cuenta que el sistema GPS mide las
coordenadas $(x,y,z)$ y el tiempo, y que existen diferentes
precisiones en función de la tecnología que los receptores
utilicen, encontramos una gran variedad de unidades
receptoras, según estas se adapten para uno u otro uso
principal. En líneas muy generales, los siguientes son
algunos de los tipos principales en función de dicho uso.
GPS para uso general. Unidades pequeñas y portátiles, de
bajo coste, para actividades al aire libre, donde no se
requiere una precisión elevada sino simplemente un
conocimiento de la posición aproximada. Se emplean, por
ejemplo, para recoger rutas en senderismo o navegación.
Estas unidades, además de informar de la posición y ser
capaces de almacenar esta, suelen disponer de
capacidades de representación de mapas en pantalla, de
forma que la información sobre la posición sea más útil
para el usuario. Otros, como los navegadores GPS para
coche, son capaces de calcular rutas óptimas, combinando
la posición calculada con una cartografía de vías
previamente incorporada al dispositivo. La figura
\ref{Fig:gps_1}a muestra un receptor GPS de uso general.
GPS para la medición topográfica. Unidades de medio
tamaño, generalmente con una antena independiente que se
conecta a la unidad y que el propio operario carga a la
espalda. La antena garantiza mayor precisión y una mejor
localización de satélites en condiciones tales como
zonas bajo arbolado. Están pensados para un uso
profesional en levantamientos o replanteos, ofreciendo
buena precisión en todas las coordenadas. En la figura
\ref{Fig:gps_1}b puede verse unos de estos receptores.
Estos son los GPS de mayor interés para el uso dentro de
un SIG, ya que ofrecen datos de campo precisos que
cumplen con las necesidades que habitualmente se tienen
en un proyecto SIG. Los datos recogidos por estas
unidades pueden ser sencillamente incorporados a un
ordenador, y en ocasiones la propia unidad dispone de
aplicaciones propias, más allá de la mera visualización
de cartografía asociada, como en el caso anterior.
GPS para la medición del tiempo. Estos GPS no resultan
de tanto interés para su uso en un SIG, ya que se
encuentran fijos en un punto y no conceden importancia a
la localización espacial, sino tan solo al tiempo. Se
utilizan en estudios que requieran una medición muy
precisa del tiempo, ya que la referencia temporal que
ofrece el sistema GPS es muy precisa y estable.
Receptor GPS de bajo coste para uso general (a) y
receptor GPS de alta precisión con antena externa
(b)
$$\label{Fig:gps_1}$$
Operaciones con la unidad GPS
La forma en que utilizamos el receptor GPS para recoger los
datos que emplearemos posteriormente en el SIG puede ser muy
variada en función del tipo de dato, la precisión necesaria
o las características del propio receptor.
Los receptores de menor coste están generalmente pensados
para ser de utilidad directamente en el campo, por ejemplo
para localizar un punto concreto y conocer la dirección en
la que hay que moverse para llegar hasta él, pero tienen
también capacidad para recoger coordenadas. Estas
capacidades son las que resultan de interés desde el punto
de vista de un SIG, ya que las coordenadas recogidas serán
después los datos que llevemos a este.
Por su parte, las unidades de mayor precisión están
concebidas para tareas tales como levantamientos
topográficos, donde la toma de datos es lo fundamental, pero
también para otras tales como replanteos, donde se requiere
situar un punto de coordenadas conocidas. Al igual que en el
anterior, las actividades que pueden llevarse a cabo con
estos GPS y que interesan desde el punto de vista del SIG
son aquellas que van a recoger coordenadas, pues son las que
generan datos y convierten al GPS en una fuente de ellos.
Las capacidades de recogida de datos en una unidad GPS de
bajo coste permiten almacenar puntos o trazados completos,
encontrándose el operario inmóvil o bien en movimiento a lo
largo de dicho trazado. Es habitual utilizar los vocablos
ingleses de la terminología GPS para denotar los distintos
elementos que pueden recogerse, conociéndose a un punto de
interés aislado como
waypoint
y un trazado como
track
. Una serie ordenada de
waypoints
se conoce como
route
(ruta).
En el trabajo con el receptor GPS, el operario se puede
detener en un punto cualquiera y memorizar las coordenadas
del mismo, añadiendo así un
waypoint
a la lista de los ya almacenados. Para crear un trazado, se
suele disponer de funcionalidades de recogida automática de
puntos, de tal modo que el receptor memoriza estos a
intervalos fijos de tiempo. El operario simplemente ha de
desplazarse por el trazado y dejar que el receptor haga su
trabajo mientras tanto. Dependiendo del tipo de dato que
quiera obtenerse, la edición posterior en gabinete habrá de
ser más o menos intensa.
Esta edición no está relacionada solo con la introducción de
correcciones, sino con la interpretación de los distintos
puntos recogidos. Por ejemplo, para registrar el trazado de
una calle, el operario puede recorrerla, pero es probable
que no lo haga de forma perfectamente rectilínea. El trabajo
posterior con el conjunto de puntos debe resultar en la
obtención de una línea recta a partir de estos, y ello
requiere la interpretación de los datos disponibles.
Pese a que la precisión de estas unidades es limitada y no
permiten técnicas avanzadas de corrección (tal precisión no
es necesarias para las actividades tales como senderismo o
navegación para las que han sido diseñados estos
receptores), los GPS de uso cotidiano pueden ser una fuente
de datos de primer orden para la recogida de datos. Un
ejemplo significativo de ello es el proyecto OpenStreetMap,
un proyecto colaborativo para crear mapas libres cuya
principal fuente de datos son unidades GPS sencillas. Este
proyecto es uno de los muchos que existen actualmente de
este tipo, los cuales se engloban dentro de la idea de
Información Geográfica Voluntaria o Participativa
, sobre la que hablaremos algo más adelante en el apartado
VGI
.
Para trabajos de mayor precisión tales como levantamientos
topográficos, estos receptores no son, sin embargo,
suficientes. El uso de receptores más precisos y de técnicas
avanzadas es necesario para obtener precisiones mayores, que
pueden ser incluso milimétricas.
Estos receptores pueden emplearse individualmente del mismo
modo que se hace con un GPS de bajo coste, y registrar
puntos de forma similar. La verdadera potencia, no obstante,
se obtiene cuando se realizan mediciones con la ayuda de una
o varias unidades adicionales, las cuales aportan valores de
referencia que permiten aumentar la precisión.
Entre el receptor móvil y el de referencia se establece una
línea base
, y en el cálculo de la posición lo que se calcula es el
vector $(x, y, z)$ que une a ambas. Se trata pues, de una
medición relativa, ya que expresa la posición del receptor
móvil a partir de la del receptor de referencia. Puesto que
la posición de este último se conoce con gran precisión y
ese vector también se calcula con precisión, la posición
buscada que se obtiene es altamente precisa.
La principal ventaja con respecto a métodos topográficos
clásicos es que no es necesario que haya visibilidad entre
los dos receptores. De esta forma, puede utilizarse una
estación de referencia aunque no sea visible desde un punto
cuyas coordenadas queremos medir, y las líneas base pueden
ser de mayor longitud.
Otras ventajas también destacables son el hecho de que puede
obtenerse una productividad mucho mayor, ya que una única
unidad de referencia puede ser utilizada por varias unidades
móviles.
El número de técnicas existentes en la actualidad para
realizar este tipo de mediciones (ya sea con uno o con
varios receptores) es variada. El hecho de que se busquen
mediciones precisas hace que se realicen mediciones
utilizando la fase de la portadora, que como vimos implica
una mayor necesidad de tiempo para registrar correctamente
una posición. En función de las características de la línea
base y los requerimientos concretos del trabajo, serán unas
u otras las más adecuadas para cada caso.
La diferencia principal entre estas técnicas es el tiempo
necesario para la recogida de un punto. En general, un mayor
tiempo equivale a una mayor precisión. Entre las técnicas
habituales, cabe citar las siguientes:
Estático
. En base a dos puntos de referencia (con una unidad GPS
fija en cada uno de ellos), se calcula la posición de un
tercero en un punto dado. Se trata del método más
preciso, pero requiere tiempos de observación muy largos
(superiores a una hora), lo que lo hace inadecuado para
levantamientos o replanteos. Este tipo de procedimientos
se emplean casi exclusivamente en trabajos geodésicos y
las líneas base pueden ser de gran longitud.
Estático rápido
. Igual que el anterior, pero con tiempos menores, del
orden de 5--10 minutos por punto medido.
Cinemático
. Los tiempos son aún menores que en el estático rápido,
del orden del minuto. El fundamento de la técnica es
distinto a los anteriores, ya que tras la inicialización
el receptor móvil puede desplazarse con más velocidad y
no es necesario que se detenga durante un periodo largo
de tiempo en cada punto, pero ello exige que durante el
desplazamiento tanto la unidad móvil como la fija de
referencia mantengan la recepción de las señales, que
han de ser de al menos cuatro satélites (preferiblemente
cinco), y los mismos para ambas unidades. Si alguna de
ellas pierde la conexión, se hace necesario repetir de
nuevo el proceso de inicialización [
Remondi1988IN
]. Existe una gran variedad de procedimientos de tipo
cinemático, cuya filosofía es esencialmente la misma,
pero bajo nombres distintos. Aunque pueden existir
diferencias en los fundamentos teóricos, la forma de
proceder es en muchos casos muy similar. Técnicas como
Stop \& Go
o
pseudocinemático
pueden incluirse en este tipo de métodos. En general,
estos y otros se engloban bajo la denominación de
procedimientos cinemáticos, aunque sus características
sean distintas en cada caso. Muchos de estos
procedimientos vienen definidos por el equipo a
utilizar, y los tiempos de paradas en cada punto medido,
así como otros aspectos, son recomendados por el propio
fabricante. La forma más correcta de llevar a cabo una
toma de datos en campo, en este caso, es seguir las
indicaciones concretas del fabricante de para cada
producto. Un caso particular dentro de los métodos
cinemáticos es el
cinemático en tiempo real
(RTK), en el que, a diferencia de los anteriores, las
correcciones necesarias se efectúan en tiempo real y no
requieren postproceso. Se trata de la técnica más
actual, y proporciona al operario mediciones exactas de
su posición de forma instantánea, con las ventajas que
ello conlleva. Las mediciones son más precisas, ya que
el operario que las toma conoce el valor recogido en el
mismo momento de hacer la medición, y puede de esa forma
realizar una comprobación en el acto. Información más
detallada sobre esta técnica puede encontrarse en [
Rizos1998BCG
].
Para profundizar más al respecto, en [
Asenjo1997UPV
] puede encontrarse información sobre la realización de
levantamientos con GPS.
En base a los ejemplos anteriores, y para concluir esta
parte, podemos dar una clasificación de las operaciones con
un receptor GPS en función de tres criterios básicos: el
número de unidades que se emplean simultáneamente, el
movimiento (o ausencia de él) del receptor y el momento en
el que se obtiene el dato ya listo para su utilización
posterior.
Según el número de unidades, tenemos:
Absolutas
. Se tiene un único receptor y un único operario. La
posición se calcula con la información de los satélites,
sin apoyo de otra unidad adicional.
Relativas
. Se emplea una unidad adicional a modo de referencia.
Las medidas se basan en la información de los satélites
y la que aporta dicha unidad de referencia, y la
posición se calcula en relación a esta en lugar de en
términos absolutos. Estas operaciones alcanzan un grado
de precisión mayor que las de tipo absoluto.
Atendiendo al movimiento del receptor encontramos:
Estáticas
.
Cinemáticas
.
Variantes intermedias
.
Por último, en función de la obtención de datos,
distinguimos:
En tiempo real
. Las correcciones pertinentes se realizan en el acto, y
el resultado que se visualiza en el receptor o se
almacena en este ya ha sido filtrado y corregido.
Con necesidad de postproceso
. Las correcciones se realizan en gabinete
posteriormente, con información que el receptor no posee
o no es capaz de procesar de modo inmediato durante su
utilización.
Integración de GPS y SIG
La utilidad de un GPS como fuente de datos para el trabajo
en un SIG es innegable. Multitud de trabajos que requieren
la toma de datos en campo y la medición de coordenadas
pueden efectuarse ventajosamente con equipos GPS, y la
información derivada de ese uso puede ser posteriormente
incorporada a un SIG.
EL GPS puede emplearse como una fuente de datos estática (se
utiliza como herramienta para la creación de una capa de
información geográfica y esta después se emplea en el SIG de
la forma habitual), o bien para la obtención de datos en
tiempo real. Los SIG sobre dispositivos móviles (véase el
apartado
SIG_Moviles
) pueden aprovechar los receptores GPS que estos
dispositivos habitualmente incorporan, y alimentarse con los
datos de dichos receptores en tiempo real.
Un caso particular de esto son los cada día más populares
navegadores GPS. Estos dispositivos aúnan el receptor GPS y
una aplicación de tipo SIG que presenta un visor y permite
ejecutar un número reducido de procesos, en concreto los de
cálculo de rutas óptimas entre dos puntos a través de una
red de comunicación (apartado
Rutas_optimas
). Uno de los puntos (el de destino) es fijado por el
usuario, mientras que el punto de origen es el punto actual
en que se encuentra el dispositivo, que se obtiene a partir
del GPS.
Como herramientas estáticas, el trabajo en campo con un GPS
genera un conjunto de puntos o de trazados, que pueden
fácilmente transferirse al ordenador para poder trabajar con
ellos. Este trabajo puede realizarse dentro de un SIG, ya
que, o bien este incluye la capacidad de importar los
archivos generados por el GPS, o el software que acompaña a
dicho GPS incorpora herramientas para ayudar en la
comunicación entre SIG y GPS.
Además de la información posicional que deriva del sistema
GPS, los receptores GPS pueden incorporar elementos que
permitan la entrada de la componente temática asociada a las
distintas entidades, es decir, los atributos.
Las funcionalidades incorporadas en el receptor suelen ser
sencillas, pero permiten que desde este se pueda llevar a
cabo todo el proceso de creación de la capa que
posteriormente se empleará en el SIG. El trabajo de campo
incluye de este modo tanto el registro y creación de las
entidades como la edición de las propiedades no espaciales
de estos. Existe, igualmente, la posibilidad de completar la
fase de introducción de atributos en el SIG, durante el
trabajo en gabinete, lo cual en ocasiones resulta más
sencillo y práctico.
El volumen de trabajo que se requiere una vez que los datos
han sido recogidos dependerá también de las necesidades de
precisión que se presenten y del tipo de trabajo en que se
enmarque dicha recogida de datos. La realización de
correcciones y la edición avanzada de los datos no puede en
ocasiones realizarse dentro de un SIG, ya que este no
dispone de las herramientas necesarias para un tratamiento
avanzado de los datos del GPS. El SIG está preparado para
trabajar con las coordenadas que salen del GPS, pero este
puede almacenar más datos (datos «en bruto»), que pueden
procesarse en gabinete para la obtención de dichas
coordenadas de forma más precisa. Para realizar esta tarea
es necesario software especializado, y las funcionalidades
del SIG se emplearán posteriormente, cuando ya se hayan
verificado los datos del GPS y elaborado las capas
correspondientes.
Para el lector interesado, una referencia completa sobre el
uso de GPS de cara a la integración de los datos en un SIG
es [
Steede2000ESRI
]. En el ya mencionado apartado
SIG_Moviles
veremos con detalle la tecnología de los SIG móviles, un
ámbito en el que SIG y GPS se unen para conformar
herramientas conjuntas.
Información Geográfica Voluntaria
Hemos mencionado ya que los dispositivos tales como
receptores GPS de bajo coste pueden emplearse para recoger
información geográfica y crear datos geográficos, y que
cuando esto se une a los conceptos participativos de la
denominada Web 2.0, surgen iniciativas de gran interés en
las que el usuario de a pie, sin necesidad de una formación
específica como cartógrafo, puede aportar sus datos para que
otros los exploten posteriormente. Aunque no se trata de una
fuente de datos como tal, y los elementos y dispositivos
empleados ya los hemos visto a lo largo de este capítulo, el
cambio que supone la inclusión de una filosofía acorde con
las ideas de la Web 2.0 es tan notable que merece ser
tratado por separado. No se trata de un cambio en la propia
toma o preparación de datos, o de una tecnología nueva que
se aplique a estos, sino de un cambio social y filosófico
que redefine el propio concepto de la información geográfica
en lo que a la creación del dato geográfico respecta, y
cuyas consecuencias son ciertamente importantes, ya que
abren el ámbito de la creación cartográfica a grupo nuevo de
personas.
Se conoce como
Información Geográfica Voluntaria o Participativa
(en inglés Volunteered Geographical Information, VGI)[
Goodchild2007VGI
] al uso de Internet para crear, gestionar y difundir
información geográfica aportada voluntariamente por usuarios
de la propia red. El conjunto de herramientas y técnicas que
emplean esos usuarios para aportar su información conforma
lo que se ha dado en llamar
neogeografía
. La comparación entre proyectos de creación de VGI y la
bien conocida Wikipedia, tal y como se comentó en otro punto
anterior en este mismo capítulo, sirve perfectamente para
ilustrar qué es lo que entendemos por VGI y neogeografía. }
En el caso particular de esta última, la neogeografía ha
supuesto un profundo cambio en algunas de las ideas básicas
de la cartografía, modificando asimismo la concepción
tradicional de la información geográfica, sus
características o el papel que esta venía desempeñando en
muchos ámbitos (o incluso dándole un papel en campos donde
con anterioridad el uso de información geográfica era
escaso). Algunas de las ideas principales sobre la
neogeografía son las siguientes:
Popularización y democratización. La producción
cartográfica ha estado siempre en manos de gobiernos u
organismos, y en muchas ocasiones fuertemente censurada
debido a su elevado valor estratégico. Con la VGI, la
creación de información geográfica se democratiza y se
convierte en un proceso participativo libre y sin
restricciones. Se invierte el esquema «hacia abajo» de
producción y uso de información geográfica.
Los ciudadanos se convierten en «sensores» y tienen
mayor consciencia de su realidad geo-espacial.
Se elimina parte del «misticismo» de la producción de
información geográfica
En parte, estas ideas son también comunes a otros fenómenos
basados en la Web 2.0, ya que todas se fundamentan en una
mayor democratización de la información, sea esta geográfica
o no. También se comparten algunos de los problemas o
críticas que otros ámbitos han recibido al adoptar esquemas
de producción similares. Por ejemplo, la calidad de la
información es puesta en entredicho al promover la
participación de todo tipo de personas, con independencia de
su perfil. En el caso de la información geográfica, con una
producción tradicionalmente como hemos dicho limitada a
profesionales muy especializados, esto es especialmente
relevante. Con la proliferación de la VGI, se da voz y poder
sobre la información geográfica a individuos en gran medida
sin formación, que no obtienen un beneficio tangible obvio y
no pueden aportar garantías de veracidad o autoridad alguna.
Esto puede plantear dudas lógicas acerca de la conveniencia
de usar esa información.
No debe olvidarse, no obstante, que la Web 2.0 también tiene
sus mecanismos de regulación, y que en otros casos ya se ha
demostrado que, para otros tipos de información, la calidad
y rigor de esta no es inferior a la creada con esquemas más
clásicos y menos abiertos.
Por otra parte, el hecho de que se use equipo de bajo coste
y los usuarios no sean técnicos especializados no es
necesariamente un problema. Un usuario sin formación no está
capacitado para efectuar un levantamiento topográfico
preciso, pero sí para situarse delante de la puerta de una
tienda y marcar su posición, añadiendo esta a un proyecto
que catalogue los comercios de la zona y su localización.
Este tipo de información geográfica, de puntos de interés
muchas veces no recogidos en cartografía más especializada,
constituye una gran parte de la VGI, y las metodologías e
instrumental con que se crea son más que suficientes para
otorgarle validez y precisión adecuada al uso del que
posteriormente va a ser objeto.
Sobre cartografía de elevaciones
La cartografía de elevaciones es probablemente la de mayor
importancia de entre todas las que se emplean de forma
habitual dentro de cualquier proyecto SIG. Su relevancia
deriva del hecho fundamental de que la practica totalidad de
procesos que se estudian en un SIG tienen algún tipo de
componente relacionada con el terreno y su relieve, y por
tanto puede obtenerse amplia información sobre dichos
procesos a partir de una capa con datos de elevación.
Dedicaremos en este libro un capítulo entero, el
Geomorfometria
, al conjunto de operaciones de análisis basadas en el MDE,
que van desde el simple cálculo de pendientes hasta la
extracción de parámetros más complejos. Asimismo, gran
número de otras formulaciones que veremos en la parte
dedicada a procesos tienen su principal aplicación sobre
datos de elevación, en particular los métodos de
interpolación que veremos en el capítulo
Creacion_capas_raster
, y que nos permitirán crear cartografía de elevaciones en
formato ráster. Este es, como veremos, el formato preferido
para el análisis de la cartografía de elevaciones, ya que
ofrece un mayor abanico de posibilidades frente a otros.
Aunque el formato ráster es el más indicado para llevar a
cabo los análisis correspondientes, la cartografía de
elevaciones puede crearse originalmente con muy diversas
características. De igual modo, y debido también a la gran
importancia de este tipo de capas, su origen puede ser muy
variado, ya que son muchas las técnicas distintas que
existen para su creación. Es de interés, por tanto, exponer
en este capítulo sobre fuentes de datos algunas de las ideas
principales relativas a la creación de capas de elevaciones,
las características de estas o las ideas fundamentales que
residen tras las metodologías más importantes.
Posteriormente, esto nos ayudará a entender mejor las
restantes formulaciones y conceptos relativos al manejo y
análisis de este tipo de cartografía, abundantes en este
libro como ya se ha dicho.
A modo de resumen, he aquí una lista de metodologías a
partir de las cuales puede obtenerse cartografía de
elevaciones, gran parte de las cuales han sido tratadas con
detalle antes en este mismo capítulo.
GPS
. Como ya sabemos, un GPS toma datos no solo de la
posición que ocupa en coordenadas $x$ e $y$, sino
también su elevación. La utilización de GPS permite
obtener una nube de puntos de elevación, aunque si esta
ha de cubrir un territorio amplio y con cierta precisión
en las medidas, resulta poco adecuado el trabajar con
esta tecnología, ya que requiere mucho tiempo. Es más
adecuada para obtener levantamientos precisos de áreas
más reducidas, donde se demuestra como una herramienta
sumamente eficaz.
Digitalización de curvas de nivel
. En ocasiones la cartografía de elevaciones ya existe,
aunque no en el formato adecuado para su empleo en un
SIG. Ya conocemos los métodos de digitalización de
entidades, tanto manuales como automáticos, y ya sea en
pantalla o en equipo especializado, y mediante ellos
podemos digitalizar las curvas de nivel, obteniendo una
capa de líneas con la información altitudinal que
contiene un mapa topográfico habitual.
Estereografía
. A partir de pares estereoscópicos, y con el concurso
de una estación fotogramétrica digital pueden delinearse
líneas o puntos de una elevación dada, digitalizando así
la información altimétrica. El procedimiento es similar
a la simple digitalización de curvas de nivel, solo que
en este caso estas no están presentes explícitamente en
las imágenes de partida, y se infieren a partir de la
visualización tridimensional de las mismas.
Interferometría
. La interferometría es una técnica cuyos fundamentos
son en cierta medida similares a los de la
estereografía, pues se basan en la información recogida
de un punto concreto desde dos puntos distintos. Si en
el caso de emplear simples imágenes esto permitía crear
una imagen tridimensional, en el caso de la
interferometría el estudio de las diferencias de fases
entre las ondas recibidas en dos puntos distintos
permite el cálculo de distancias. Se trata, por tanto,
de un proceso automatizado, que requiere menos
intervención que en el caso de la restitución
fotogramétrica.
Un uso muy habitual de esta técnica es con los
denominados
Radares de Apertura Sintética
, utilizado por ejemplo en el caso de la misión
SRTM, que reseñamos anteriormente como producto
importante. La medición desde dos puntos puede
hacerse con dos pasadas de satélite (caso por
ejemplo del ERS) o bien en una sola si la plataforma
dispone de dos receptores separados una cierta
distancia (caso del SRTM). En [
SARInterferometry
] puede encontrarse una descripción detallada de
este tipo de técnicas y las etapas que comprenden.
LiDAR
. La técnica más avanzada en la actualidad es el uso de
aparatos de altimetría basados en láser, como el LiDAR,
que ya hemos visto en este mismo capítulo. El LiDAR
ofrece posibilidades muy interesantes tales como la
obtención de MDE y MDS (Modelo Digital de Superficie)
por separado.
El resultado de un trabajo con LiDAR es una nube de
puntos, normalmente en un número muy elevado debido
a la precisión del instrumento, la cual puede
emplearse para crear otro tipo de capas, tales como
capas ráster. El nivel de postproceso que se
requiere para la obtención final de una capa es
mucho menor que con otras técnicas.
A la hora de plantear un proyecto SIG, debe elegirse entre
estas fuentes, tanto si se desea adquirir la cartografía ya
elaborada como si se desea crearla a partir de otras
fuentes. La variedad de opciones existentes es grande, y
cada una de ellas tiene sus características peculiares. Para
saber más al respecto, algunas referencias donde puede
encontrarse una comparación entre las metodologías
anteriores son [
Nikolakopoulos2006IJRS
], [
Mercer1999ISPRS
] y [
Mercer2001PW
].
Formatos de archivo
Conocer las distintas fuentes de datos es importante para
elaborar una base de datos geográfica que permita obtener
los mejores resultados posibles, pero también lo es el
conocer la forma en que esos datos pueden guardarse y
transmitirse. Los datos geográficos se van a almacenar en
archivos, y existen muchos formatos de archivo distintos
para recoger un mismo conjunto de datos.
Estos archivos son la materialización de los modelos de
almacenamiento que veíamos en el apartado
Modelos_almacenamiento
, y su existencia obedece a distintas razones. Pueden haber
sido definidos por alguna casa comercial para ser utilizados
en su software, por un colectivo, o bien pueden ser
estándares internacionales definidos para tratar de
homogeneizar la forma en que se presentan los datos dentro
de un determinado ámbito de trabajo.
Datos de una misma procedencia pueden presentarse de forma
distinta si se emplean diferentes formatos de archivo. Las
circunstancias por las cuales se opta por uno u otro formato
pueden basarse únicamente en el hecho de que el software
empleado soporte o no dicho formato, pero deberían
fundamentarse en las propias características del formato y
lo adecuadas que estas son para recoger la información con
la que trabajamos.
La existencia de muchos formatos de archivo dificulta el
trabajo con los datos en un SIG, principalmente porque
ningún SIG implementa la capacidad de poder «leer» todos los
formatos existentes. La interoperabilidad y la comunicación
entre distintos SIG, o incluso entre un SIG y otras
aplicaciones (bases de datos, aplicaciones para manejo de
imágenes, aplicaciones CAD) no es completa, y el
aprovechamiento de todos los datos disponibles dentro de un
proyecto requiere normalmente tiempo para la gestión
adecuada de datos en formatos variados.
Un problema más serio, no obstante, es el desconocimiento
por parte de los usuarios de las implicaciones que tiene el
uso de uno u otro formato, ya que en ocasiones no permiten
aprovechar de modo pleno los datos de que se dispone. Por
ejemplo, dentro de un SIG es habitual emplear datos
procedentes de CAD. Los datos en un CAD se almacenan en
formatos de datos definidos por esas aplicaciones CAD, los
cuales han sido definidos para satisfacer las necesidades
del ámbito de trabajo en el que se han desarrollado (el
diseño asistido por ordenador). Aunque los SIG pueden leer
esos formatos de archivo y se encuentra información muy
valiosa almacenada en ellos, no son ideales para el manejo
de capas de datos SIG (en este caso, capas vectoriales), y
es importante conocer este hecho.
La existencia de librerías que actúan a modo de interpretes
facilita el desarrollo de aplicaciones SIG con capacidades
de lectura y escritura en muchos formatos distintos, pero
aún así se requiere un cierto grado de comprensión de estos
por parte del usuario.
Debemos pensar asimismo que los formatos de archivo no solo
se emplean en un proyecto SIG para los datos de entrada,
sino también para almacenar los resultados que se generan a
lo largo de ese proyecto. Estos datos serán utilizados en el
propio SIG en otras ocasiones posteriores, o bien en otros
programas. De este modo, tomamos datos que pueden provenir
de aplicaciones y fuentes diversas, pero también «damos»
datos a esas aplicaciones, por lo que la comunicación es
bidireccional. Puesto que es a través de archivos como dicha
comunicación se produce, y estos tienen que tener un formato
dado, el conocimiento de estos formatos mejora tanto esa
comunicación como la potencialidad de nuestros datos para
todo tipo de uso, ya sea dentro o fuera de un SIG.
En esta sección no se pretende describir todos los formatos
existentes, ya que son demasiados y ello no tendría sentido.
Se describirán solo los más populares (que no siempre han de
ser necesariamente los mejores) para que el lector obtenga
un conocimiento general de
cómo
se van a presentar sus datos, y a través de estos formatos
se describirán los principales enfoques existentes, que son
los que realmente ha de conocer un usuario de SIG para saber
discernir si un formato es o no adecuado para sus datos y
las operaciones que quiere aplicar sobre ellos.
Junto con estos formatos de archivo, en el capítulo
Estandares
se presentan los estándares de datos, que también se emplean
para el intercambio y almacenamiento de datos SIG, y que
presentan una relación estrecha con el contenido de esta
sección. El capitulo
Bases_datos
, que veremos dentro de esta misma parte, también guarda
relación con este apartado, pues estudia las diferentes
formas en que los SIG han solucionado a lo largo del tiempo
el acceso a los datos, incluyendo entre ellas el acceso
directo a archivos.
Formatos para datos ráster
Los formatos de archivo para datos ráster son muy
abundantes, existiendo numerosas alternativas con
diferencias en ocasiones notables entre sí. Debido a que uno
de los datos ráster más habituales en un SIG son las
imágenes, a los formatos de datos específicos para datos
ráster hay que sumar aquellos ya existentes para el
almacenamiento de imágenes, que son de por sí muy variados.
Estos formatos, adaptados a la naturaleza particular de las
imágenes de un SIG, pueden emplearse para almacenar datos
ráster y son de hecho de uso habitual en el ámbito de los
Sistemas de Información Geográfica.
Formatos para imágenes
Las imágenes son un tipo de dato muy habitual en un SIG y se
corresponden con el modelo de datos ráster. Por ello, los
formatos de archivo empleados para el almacenamiento de
imágenes digitales se emplean también para las imágenes
particulares que utilizamos en un SIG (por ejemplo,
fotografías aéreas o mapas escaneados, según vimos antes en
este mismo capítulo), e incluso para otros datos ráster que
no son imágenes como tales, como por ejemplo un Modelo
Digital de Elevaciones.
Los formatos de archivo para imágenes son adecuados para
recoger los colores de las imágenes, pero esto no es
suficiente a la hora de almacenar otros valores (por
ejemplo, valores decimales) o bien cuando son necesarios un
número más elevado de bandas, como en el caso de imágenes
hiperespectrales.
Una imagen en blanco y negro o en escala de grises contiene
una banda. Una imagen en color contiene tres, ya que los
colores se expresan como una terna de colores básicos: rojo,
verde y azul. Este es el fundamento del modelo de color RGB,
en el cual todo color es la combinación de distintas
intensidades de los anteriores colores básicos. Las
intensidades de cada banda (o las intensidades de la única
banda en el caso de una imagen en escala de grises) se
expresan habitualmente con valores entre 0 y 255, un rango
que resulta insuficiente para el manejo de otras variables
tales como las variables físicas que pueden emplearse en un
SIG, ya que estas presentan valores continuos.
En estos casos, los formatos de imágenes no son adecuados en
su forma original, y deben o bien adaptarse o bien emplearse
formatos más específicos que tengan en cuenta el tipo
particular de datos que se almacenan.
Otro problema es la presencia de celdas sin datos. La
existencia de celdas sin datos es un hecho que no contemplan
los formatos de imágenes. A estas celdas se les asigna un
valor establecido por defecto, el cual ha de definirse en el
propio archivo para que después sea reconocido por el SIG
(para que sepa que, donde aparezca ese valor, realmente no
existen datos), pero muchos formatos de imagen no puede
almacenarlo. Una posible solución es la utilización de
formatos que permitan transparencia. En estos, se puede
especificar un color como transparente, que a efectos de su
utilización en un SIG puede considerarse como indicación de
la ausencia de datos. Estos formatos, no obstante, no son
los más adecuados para datos SIG, y esta solución no
resuelve por completo esta deficiencia.
Otra carencia de la mayoría de formatos de imágenes es que
no pueden recoger la referencia geográfica de la imagen.
Salvo que las imágenes sean utilizadas en un SIG, no hay
necesidad de que estas contengan información tal como el
tamaño de píxel (los metros que cada píxel representa en la
realidad) o las coordenadas de la zona que recogen. Por
ello, las definiciones de los formatos de imagen, al estar
pensadas para recoger meras imágenes digitales (y no
imágenes de satélite o aéreas destinadas a un análisis
espacial), no tienen en cuenta estas necesidades.
Una forma habitual de resolver esto es acompañar cada
fichero de imagen con un pequeño fichero de texto plano
donde se contengan los datos geográficos correspondientes a
la imagen. Este fichero se denomina
World File
, y contiene los siguientes valores:
Tamaño de celda en la dirección Este--Oeste
Ángulos de rotación del plano respecto a los ejes X e Y.
Estos valores son siempre iguales a cero.
Tamaño de celda en la dirección Norte--Sur, con signo
negativo
Coordenadas
x
e
y
del píxel superior izquierdo de la imagen.
Este
World File
tiene el mismo nombre que el archivo de imagen, y su
extensión se forma con la primera y la última letra de la
extensión de dicho archivo, y la letra
w
. Así, para un archivo
imagen.tif
, se tendrá un archivo
imagen.tfw
. Cuando el SIG abre la imagen, busca dicho fichero y, en
caso de existir este, toma de él la información que necesita
para poder incorporar la imagen al SIG de forma completa, de
tal modo que sobre ella puedan llevarse a cabo análisis
espaciales u operaciones como la digitalización en pantalla
(heads--up) que hemos visto anteriormente.
Por último, un aspecto importante de los archivos de imagen
es el tipo de compresión que utilizan. Las imágenes con las
que se trabaja en un SIG pueden ser muy voluminosas, y para
almacenarlas es necesaria gran cantidad de espacio (puede
ser del orden de
gigabytes
para el caso de imágenes de alta resolución). Por esta
razón, los formatos de imagen, especialmente los que han
sido creados específicamente para imágenes SIG, incluyen
algún método de compresión para disminuir el volumen del
archivo.
En el apartado relativo a los modelos de almacenamiento
vimos algunas ideas sobre compresión, presentando la
codificación
run--length
. Esta es una estrategia para almacenar la información de
forma que se minimice el tamaño de los datos necesarios, y
en base a los datos recogidos puede recuperarse toda la
imagen de forma exacta. Es decir, la utilización de estas
formas de compresión no supone una degradación de la
información contenida en la imagen, y nada de esta se pierde
en el proceso. Podemos comprimir y descomprimir la imagen
tantas veces como queramos, y el resultado siempre será el
mismo, fiel a la imagen original. Un formato de archivo que
cumple esto se dice que emplea un método de compresión
sin pérdidas
.
Por el contrario, existen otros métodos de compresión
con pérdidas
, en los cuales se pierde información y la imagen
resultante, además de ocupar menos espacio, tiene una menor
calidad y no es exactamente igual a la original, sino
simplemente muy similar a esta. Los algoritmos de compresión
con pérdidas toman de la imagen original la información más
importante para después recrear esta, ignorando la menos
relevante, que se pierde en aras de obtener un menor volumen
de almacenamiento.
Siempre que sea posible, los formatos de compresión sin
pérdidas deben preferirse frente a los que utilizan
algoritmos de compresión con pérdidas. En función de las
necesidades que se tenga con respecto a las imágenes a
almacenar, debe elegirse el formato adecuado, considerando
siempre la degradación que la compresión con pérdidas
implica.
Algunos formatos de imagen que emplean compresión con
pérdidas son altamente populares, ya que se emplean para
tareas donde la reducción de tamaño de los ficheros es
prioritaria, y este tipo de compresión ofrece una reducción
en general mayor que la de los algoritmos sin pérdidas. Así,
por ejemplo, las imágenes que se incorporan en paginas Web
han de ser de pequeño tamaño para agilizar su carga, y ese
tamaño resulta un factor decisivo, especialmente donde la
velocidad de conexión es limitada. Para el trabajo con un
SIG, no obstante, la calidad de la imagen es de mucho mayor
importancia que su tamaño, y los formatos de compresión sin
pérdidas responden mejor a las necesidades del
almacenamiento de datos SIG.
En la imagen \ref{Fig:Compresion_con_perdidas} puede verse
el efecto de la utilización de compresión con pérdidas.
Efectos de la utilización de algoritmos de
compresión con pérdidas. a) Imagen original. b)
Imagen almacenada mediante compresión con pérdidas.
c) Imagen tras diez procesos de lectura y
almacenamiento en un formato de archivo con
compresión con pérdidas.
$$\label{Fig:Compresion_con_perdidas}$$
Formatos para datos SIG
Junto con los formatos de archivo para imágenes, los SIG
ráster han desarrollado sus propios formatos para el
almacenamiento de capas ráster en general, y en particular
de aquellas que no representan imágenes, tales como capas de
variables físicas.
Estos formatos están pensados para las características de
estas capas, que habitualmente recogen valores decimales (a
diferencia de los valores enteros de los Niveles Digitales
de una imagen), y que no suelen contener más que una única
banda.
Prácticamente cada SIG tiene su propio formato de archivo
ráster, y otras aplicaciones que trabajan con este tipo de
datos, tales como todas aquellas que usan por una u otra
razón información de elevaciones, también disponen de sus
formatos particulares. Muchos SIG pueden leer algunos de
estos formatos junto con los suyos propios .
Principales formatos existentes
Dentro de la gran variedad de formatos existentes, he aquí
una breve lista de los principales, los cuales suelen
encontrarse con frecuencia a lo largo del desarrollo de un
proyecto SIG habitual.
Dentro de los formatos para imágenes, cabe destacar los
siguientes:
Tagged Image File Format (tif)
. Se trata de un formato complejo y altamente flexible,
con muchas variantes distintas. Puede incorporar tanto
compresión con pérdidas como sin pérdidas, en función
del algoritmo que se utilice. Se utiliza habitualmente
tanto en el ámbito del tratamiento de imágenes como en
el ámbito SIG. En este último, permite también el
almacenamiento de valores decimales, siendo apto para
almacenar capas que no representen imágenes como tal. Es
un formato habitualmente generado por los escáneres, con
lo cual es frecuente su utilización al trabajar con
cartografía escaneada, según vimos antes en este mismo
capítulo. Existe una variante denominada GeoTIFF, que
permite incorporar en el propio fichero la
georreferencia de la imagen, haciendo innecesario el uso
de un
World File
asociado.
Joint Photographic Experts Group (jpg o jpeg)
. Un formato muy popular para imágenes (todas las
cámaras digitales lo utilizan), no es sin embargo
adecuado para el trabajo con SIG. Incorpora compresión
con pérdidas (el ejemplo de la figura
\ref{Fig:Compresion_con_perdidas} ha sido realizado
utilizando este formato), y no es apto para almacenar
capas ráster que no sean de tipo imagen.
Algunos formatos específicos para imágenes SIG tales como
imágenes de satélite, son:
Enhanced Compression Wavelet (ecw)
. Está especialmente preparado para almacenar imágenes
de gran tamaño, ya que las imágenes aéreas o de satélite
en general tiene tamaños mayores que las imágenes de uso
genérico para las que están pensados los formatos como
TIFF o JPEG. En el uso de estas imágenes de gran tamaño
en un SIG, es habitual que se quiera acceder a la imagen
(por ejemplo para su visualización) solo en una parte
determinada de la misma. Para optimizar este tipo de
acceso, el formato soporta acceso sin necesidad de
descomprimir la totalidad del archivo (descompresión
selectiva). Se trata de un formato de compresión con
pérdidas, y su grado de compresión es alto.
Multi--resolution Seamless Image Database (MrSID)
(sid). Al contrario que el anterior, que es un formato
abierto, el formato MrSID es un formato cerrado, pero
sus características son similares: alta compresión,
preparado para imágenes de gran volumen y con
posibilidad de descompresión selectiva.
Por último, entre los formatos para datos ráster (no
imágenes) más comunes destacar el siguiente:
ArcInfo ASCII (asc)
. Un formato en texto plano ASCII. Únicamente soporta
una única banda, y permite almacenar el valor a
considerar como valor de sin datos.
Formatos para datos vectoriales
Sin ser tan abundantes como los formatos para datos ráster,
existe también un buen número de formatos de archivo para
datos vectoriales. Al igual que en el caso ráster, estos
formatos de archivo no derivan únicamente de los SIG, sino
también de otras aplicaciones que utilizan capas de tipo
vectorial, con particular importancia de las de diseño
asistido por ordenador (CAD).
A la hora de definir las características de un formato de
archivo para datos vectoriales, encontramos dos aspectos
principales, a saber:
Capacidad para recoger la topología de la capa
Capacidad para recoger los atributos de las entidades.
En el primer aspecto, debemos considerar que existen SIG no
topológicos, es decir, que no son capaces de manejar
información sobre la topología de la capa, y por tanto no la
necesitan. Los formatos de archivo de estos SIG no estarán
por tanto pensados para trabajar con topología, y por ello
no la almacenan.
Respecto a la capacidad para recoger los atributos de una
capa, este aspecto afecta principalmente a los formatos
propios de las aplicaciones CAD. En estas, la componente
espacial es la que prima, no teniendo tanta relevancia la
componente temática. Los puntos, líneas y polígonos con los
que se trabaja en un CAD no tiene atributos asociados salvo
aquellos relacionados con su propia representación tales
como color, grosor o estilo. Existen formas de asociar una
componente temática a esas entidades, pero estas son
variadas y la interoperabilidad disminuye en caso de
emplearlas, ya que no están soportadas con carácter general
en los distintos SIG.
Por esta razón, estos formatos son aptos para introducir
información dentro de un SIG o para exportarla a un CAD con
objeto de utilizar capacidades de este que no se tengan en
el SIG, pero como formatos de almacenamiento de datos dentro
de un SIG no son los más adecuados, y debe optarse por otros
más específicos para datos SIG.
Principales formatos existentes
Los formatos más extendidos para datos SIG vectoriales son
los siguientes:
Shapefile (shp)
. Propuesto por la empresa ESRI, es el formato más
utilizado en la actualidad, convertido en un estándar
de facto
. No soporta topología y se compone de diversos
ficheros, cada uno de los cuales contiene distintos
elementos del dato espacial (geometrías, atributos,
índices espaciales, etc.)
Spatialite
. Una extensión espacial para la base de datos
SQLite
. Se trata de una base de datos, pero no tiene la
arquitectura clásica de esta, con aplicación cliente y
un servicio que provee los datos (lo veremos con más
detalle en el capítulo
Bases_datos
), sino que toda ella se encuentra almacenada en un
fichero que puede copiarse o eliminarse de la forma
habitual. Basado en él, surge el formato GeoPackage, que
cada día va cobrando más popularidad.
GeoJSON
. Un formato de texto plano basado en notación JSON, de
uso extendido debido a su simplicidad. Existe una
variante denominada TopoJSON, que permite el
almacenamiento de topología.
Resumen
Los datos con los que trabajamos en un SIG pueden tener muy
distintas procedencias. Distinguimos aquellos que provienen
directamente de algún tipo de medida o del empleo directo de
alguna instrumentación (fuentes de datos primarias), y otros
que proceden de procesar un dato ya existente para adaptarlo
a su uso en un SIG (fuentes de datos secundarias).
Una forma básica de crear datos espaciales digitales es la
utilización de fuentes no digitales y su digitalización.
Este proceso puede llevarse a cabo tanto de forma manual
como automatizada, y puede dar como resultado tanto capas
ráster como capas vectoriales.
La teledetección es una fuente de datos de gran importancia
para los SIG. Dentro de ella se incluyen técnicas de muy
diversa índole cuyos productos son muy distintos entre sí.
El fundamento de la teledetección es la medición de las
propiedades de los objetos realizada sin que medie contacto
con estos. Para ello, se emplean sensores que pueden ir a
bordo de aviones o montados sobre satélites, y que pueden
ser de tipo pasivo o activo. El resultado del proceso de
teledetección son imágenes con un número variable de bandas,
aunque tecnologías como el radar o el LiDAR pueden emplearse
para la generación de cartografía de elevaciones.
Dentro de las tecnologías que permiten la recogida de datos
en campo, el GPS ha supuesto un cambio en la realización de
este tipo de trabajos, y su integración en SIG es sencilla.
Esto les ha convertido en una fuente de datos muy utilizada
en un gran número de proyectos SIG.
Independientemente de su origen, los datos espaciales se
almacenan en archivos cuyos formatos son a su vez muy
variados. En este capítulo hemos visto algunos de los más
habituales, así como los aspectos más importantes que los
definen, y que han de tenerse en cuenta a la hora de
trabajar con dichos formatos y elegir los más adecuados.